rlIsDoneFunction
Is-done function approximator object for neural network-based environment
Since R2022a
Description
When creating a neural network-based environment using rlNeuralNetworkEnvironment, you can specify the is-done function approximator
using an rlIsDoneFunction object. Do so when you do not know a ground-truth
termination signal for your environment.
The is-done function approximator object uses a deep neural network as internal approximation model to predict the termination signal for the environment given one of the following input combinations.
Observations, actions, and next observations
Observations and actions
Actions and next observations
Next observations
Creation
Description
isdFcnAppx = rlIsDoneFunction(net,observationInfo,actionInfo,Name=Value)isdFcnAppx using the
deep neural network net and sets the
ObservationInfo and ActionInfo
properties.
When creating an is-done function approximator you must specify the names of the deep neural network inputs using one of the following combinations of name-value pair arguments.
ObservationInputNames,ActionInputNames, andNextObservationInputNamesObservationInputNamesandActionInputNamesActionInputNamesandNextObservationInputNamesNextObservationInputNames
You can also specify the UseDeterministicPredict and
UseDevice properties using optional name-value pair arguments. For
example, to use a GPU for prediction, specify UseDevice="gpu".
Input Arguments
Properties
Object Functions
rlNeuralNetworkEnvironment | Environment model with deep neural network transition models |
Examples
Create Is-Done Function and Predict Termination
Create an environment interface and extract observation and action specifications. Alternatively, you can create specifications using rlNumericSpec and rlFiniteSetSpec.
env = rlPredefinedEnv("CartPole-Continuous");
obsInfo = getObservationInfo(env);
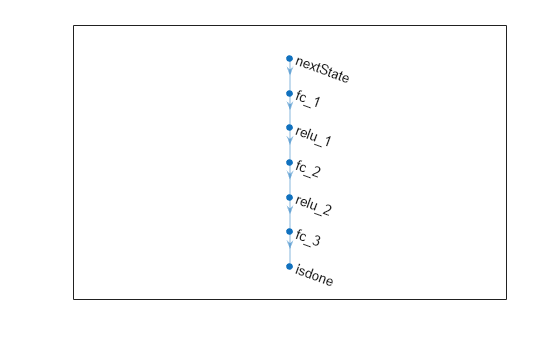
actInfo = getActionInfo(env);To approximate the is-done function, use a deep neural network. The network has one input channel for the next observations. The single output channel is for the predicted termination signal.
Create the neural network as a vector of layer objects.
net = [
featureInputLayer( ...
obsInfo.Dimension(1), ...
Name="nextState")
fullyConnectedLayer(64)
reluLayer
fullyConnectedLayer(64)
reluLayer
fullyConnectedLayer(2)
softmaxLayer(Name="isdone")
];Convert to dlnetwork object.
net = dlnetwork(net);
Plot network.
plot(net)
Initialize network and display the number of weights.
net = initialize(net); summary(net);
Initialized: true
Number of learnables: 4.6k
Inputs:
1 'nextState' 4 features
Create an is-done function approximator object.
isDoneFcnAppx = rlIsDoneFunction(... net,obsInfo,actInfo,... NextObservationInputNames="nextState");
Using this is-done function approximator object, you can predict the termination signal based on the next observation. For example, predict the termination signal for a random next observation. Since for this example the termination signal only depends on the next observation, use empty cell arrays for the current action and observation inputs.
nxtobs = rand(obsInfo.Dimension);
predIsDone = predict(isDoneFcnAppx,{},{},{nxtobs})predIsDone = 0
You can obtain the termination probability using evaluate.
predIsDoneProb = evaluate(isDoneFcnAppx,{nxtobs})predIsDoneProb = 1x1 cell array
{2x1 single}
predIsDoneProb{1}ans = 2x1 single column vector
0.5405
0.4595
The first number is the probability of obtaining a 0 (no termination predicted), the second one is the probability of obtaining a 1 (termination predicted).
Version History
Introduced in R2022a
See Also
Functions
Objects
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)