plotTrajectory
Plot set of trajectories in trajectory plotter
Description
plotTrajectory(
plots trajectories specified by trajPlotter,trajCoordList)trajCoordList via the trajectory
plotter on a theater plot.
Examples
Define the coordinates for three trajectories.
coordinates1 = [(1:10)' (2:11)' (11:-1:2)']; coordinates2 = coordinates1 + 1; coordinates3 = coordinates1 + 2;
Create a theaterPlot object, set the view angles, and create a trajectoryPlotter object.
tp = theaterPlot;
view(14,50)
trajPlotter = trajectoryPlotter(tp,DisplayName="Trajectories");Plot the three trajectories.
plotTrajectory(trajPlotter,{coordinates1,coordinates2,coordinates3})
This example shows how to create an animation of a platform moving on a trajectory.
First, create a trackingScenario and add waypoints for a trajectory.
ts = trackingScenario;
height = 100;
d = 1;
wayPoints = [ ...
-30 -25 height;
-30 25-d height;
-30+d 25 height;
-10-d 25 height;
-10 25-d height;
-10 -25+d height;
-10+d -25 height;
10-d -25 height;
10 -25+d height;
10 25-d height;
10+d 25 height;
30-d 25 height;
30 25-d height;
30 -25+d height;
30 -25 height];Specify a time for each waypoint.
elapsedTime = linspace(0,10,size(wayPoints,1));
Next, create a platform in the tracking scenario and add trajectory information using the trajectory method.
target = platform(ts); traj = waypointTrajectory('Waypoints',wayPoints,'TimeOfArrival',elapsedTime); target.Trajectory = traj;
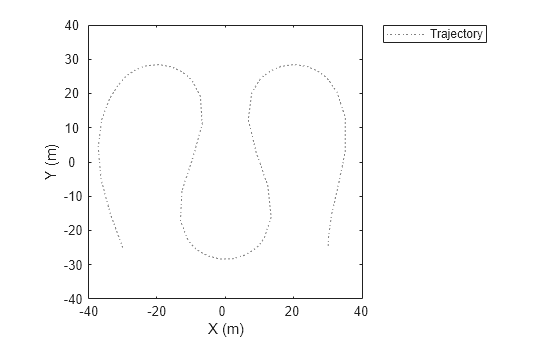
Record the tracking scenario to retrieve the platform's trajectory.
r = record(ts); pposes = [r(:).Poses]; pposition = vertcat(pposes.Position);
Create a theater plot to display the recorded trajectory.
tp = theaterPlot('XLim',[-40 40],'YLim',[-40 40]); trajPlotter = trajectoryPlotter(tp,'DisplayName','Trajectory'); plotTrajectory(trajPlotter,{pposition})
Animate using the platformPlotter.
restart(ts); trajPlotter = platformPlotter(tp,'DisplayName','Platform'); while advance(ts) p = pose(target,'true'); plotPlatform(trajPlotter, p.Position); pause(0.1) end

This animation loops through all the generated plots.
Input Arguments
Version History
Introduced in R2018b
See Also
trajectoryPlotter | theaterPlot | clearData | clearPlotterData