Nonlinear Model Identification
Use nonlinear model identification when a linear model does not completely capture your system dynamics. You can identify nonlinear models in the System Identification app or at the command line. System Identification Toolbox™ enables creation and estimation of four nonlinear model structures:
Nonlinear ARX models — Represent nonlinearities in your system using dynamic nonlinear mapping objects such as wavelet networks, tree-partitioning, and sigmoid networks.
Hammerstein-Wiener models — Estimate static nonlinearities in an otherwise linear system.
Nonlinear grey-box models — Represent your nonlinear system using ordinary differential or difference equations (ODEs) with unknown parameters.
Neural state-space models — Use neural networks to represent the functions that define the nonlinear state-space realization of your system.
Nonlinear model identification requires uniformly sampled time-domain data. Your data can have one or more input and output channels. You can also model time series data using nonlinear ARX and nonlinear grey-box models. For more information, see About Identified Nonlinear Models.
You can use the identified models to simulate and predict model output at the command line, in the app, or in Simulink®. If you have Control System Toolbox™, you can also linearize your model and use it for control-system design. For more information, see Linear Approximation of Nonlinear Black-Box Models.
Categories
- Nonlinear Model Identification Basics
Identified nonlinear models, black-box modeling, and regularization
- Nonlinear ARX Models
Nonlinear behavior modeled using dynamic networks such as sigmoid and wavelet
- Hammerstein-Wiener Models
Connection of linear dynamic systems with static nonlinearities such as saturation and dead zone
- Nonlinear Grey-Box Models
Estimate coefficients of nonlinear differential, difference and state-space equations
- Neural State-Space Models
Use neural networks to represent the functions defining the nonlinear state space realization of your system
- Reduced Order Modeling
Reduce computational complexity of models by creating accurate surrogates using System Identification Toolbox software
Featured Examples

Nonlinear Modeling of a Magneto-Rheological Fluid Damper
Nonlinear black-box modeling of the dynamic behavior of a magneto-rheological fluid damper, using Nonlinear ARX and Hammerstein-Weiner models.

A Tutorial on Identification of Nonlinear ARX and Hammerstein-Wiener Models
Identify single-input-single-output (SISO) nonlinear black box models using measured input-output data.

Motorized Camera - Multi-Input Multi-Output Nonlinear ARX and Hammerstein-Wiener Models
Estimate multi-input multi-output (MIMO) nonlinear black box models from data.

Use LSTM Network for Linear System Identification
Use Long Short-Term Memory (LSTM) neural networks to estimate a linear system and compares this approach to transfer-function estimation.

Reduced Order Modeling of Electric Vehicle Battery System Using Neural State-Space Model
A reduced order modeling (ROM) workflow, where you use deep learning to obtain a low-order nonlinear state-space model that serves as a surrogate for a high-fidelity battery model. The low-order model takes the current (charge or discharge) and state of charge (SOC) as inputs and predicts voltage and temperature of an electric vehicle (EV) battery module while the battery is being cooled by an edge-cooled plate with a coolant at a constant flow rate. You train the low-order model and deploy it in Simulink® to compare it against the high-fidelity model.
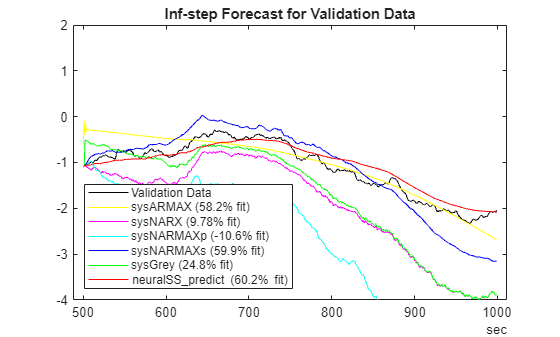
Generate NARMAX Models
Generate NARMAX models using the available model structures and their training algorithms by preparing a finite-horizon prediction algorithm. The available model structures include nonlinear ARX, grey-box, and neural state-space models. For more information on the model structures, see Identifying NARMAX Models.