ar
Estimate parameters when identifying AR model or ARI model for scalar time series
Syntax
Description
sys = ar(y,n,___,Name,Value)'IntegrateNoise',1 estimates an ARI model, which is
useful for systems with nonstationary disturbances. Specify Name,Value
after any of the input argument combinations in the previous syntaxes.
Examples
Estimate an AR model and compare its response with the measured output.
Load the data, which contains the time series tt9 with noise.
load sdata9 tt9
Estimate a fourth-order AR model.
sys = ar(tt9,4)
sys =
Discrete-time AR model: A(z)y(t) = e(t)
A(z) = 1 - 0.8369 z^-1 - 0.4744 z^-2 - 0.06621 z^-3 + 0.4857 z^-4
Sample time: 0.0039062 seconds
Parameterization:
Polynomial orders: na=4
Number of free coefficients: 4
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using AR ('fb/now') on time domain data "tt9".
Fit to estimation data: 79.38%
FPE: 0.5189, MSE: 0.5108
Model Properties
The output displays the polynomial containing the estimated parameters alongside other estimation details. Under Status, Fit to estimation data shows that the estimated model has 1-step-ahead prediction accuracy above 75%.
You can find additional information about the estimation results by exploring the estimation report, sys.Report. For instance, you can retrieve the parameter covariance.
covar = sys.Report.Parameters.FreeParCovariance
covar = 4×4
0.0015 -0.0015 -0.0005 0.0007
-0.0015 0.0027 -0.0008 -0.0004
-0.0005 -0.0008 0.0028 -0.0015
0.0007 -0.0004 -0.0015 0.0014
For more information on viewing the estimation report, see Estimation Report.
Given a sinusoidal signal with noise, compare the spectral estimates of Burg's method with those found using the forward-backward approach.
Generate an output signal and convert it into an iddata object.
y = sin([1:300]') + 0.5*randn(300,1); y = iddata(y);
Estimate fourth-order AR models using Burg's method and using the default forward-backward approach. Plot the model spectra together.
sys_b = ar(y,4,'burg'); sys_fb = ar(y,4); spectrum(sys_b,sys_fb) legend('Burg','Forward-Backward')
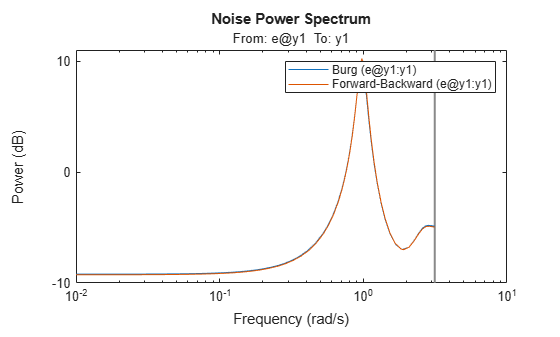
The two responses match closely throughout most of the frequency range.
Estimate an ARI model, which includes an integrator in the noise source.
Load the data, which contains the time series ymat9 with noise. Ts contains the sample time.
load sdata9 ymat9 Ts
Integrate the output signal.
y = cumsum(ymat9);
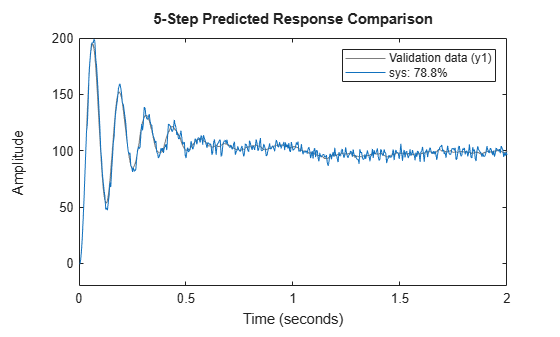
Estimate an AR model with 'IntegrateNoise' set to true. Use the least-squares method 'ls'.
sys = ar(y,4,'ls','Ts',Ts,'IntegrateNoise',true);
Predict the model output using 5-step prediction and compare the result with the integrated output signal y.
compare(y,sys,5)
Modify the default options for the AR function.
Load the data, which contains a time series z9 with noise.
load iddata9 z9
Modify the default options so that the function uses the 'ls' approach and does not estimate covariance.
opt = arOptions('Approach','ls','EstimateCovariance',false)
opt =
Option set for the ar command:
Approach: 'ls'
Window: 'now'
DataOffset: 0
EstimateCovariance: 0
MaxSize: 250000
Description of options
Estimate a fourth-order AR model using the updated options.
sys = ar(z9,4,opt);
Retrieve reflection coefficients and loss functions when using Burg's method.
Lattice-based approaches such, as Burg's method 'burg' and geometric lattice 'gl', compute reflection coefficients and corresponding loss function values as part of the estimation process. Use a second output argument to retrieve these values.
Generate an output signal and convert it into an iddata object.
y = sin([1:300]') + 0.5*randn(300,1); y = iddata(y);
Estimate a fourth-order AR model using Burg's method and include an output argument for the reflection coefficients.
[sys,refl] = ar(y,4,'burg');
reflrefl = 2×5
0 -0.3562 0.4430 0.5528 0.2385
0.8494 0.7416 0.5960 0.4139 0.3904
Input Arguments
Name-Value Arguments
Output Arguments
More About
Algorithms
AR and ARI model parameters are estimated using variants of the least-squares method. The
following table summarizes the common names for methods with a specific combination of
approach and window argument values.
| Method | Approach and Windowing |
|---|---|
| Modified covariance method | (Default) Forward-backward approach with no windowing |
| Correlation method | Yule-Walker approach with prewindowing and postwindowing |
| Covariance method | Least squares approach with no windowing. arx uses this
routine |
References
[1] Marple, S. L., Jr. Chapter 8. Digital Spectral Analysis with Applications. Englewood Cliffs, NJ: Prentice Hall, 1987.