read
Syntax
Description
Add-On Required: This feature requires the Lidar Toolbox Support Package for Hokuyo Lidar Sensors add-on.
scan = read(hokuyoObj)hokuyolidar2d
object hokuyoObj, and stores the read data in a lidarScan object,
scan.
[
returns the intensity value corresponding to each data point.scan,intensities] = read(hokuyoObj)
[___] = read(___,ScanAngleLimits=
specifies the lower and upper limits of the scan angles for reading the lidar scan data, in
addition to any combination of arguments from previous syntaxes.scanAngleLimits)
Examples
Create a hokuyolidar2d object.
hokuyoObj = hokuyolidar2d;
Read the latest 2-D lidar scan by using the read function of
the hokuyolidar2d object.
scan = read(hokuyoObj);
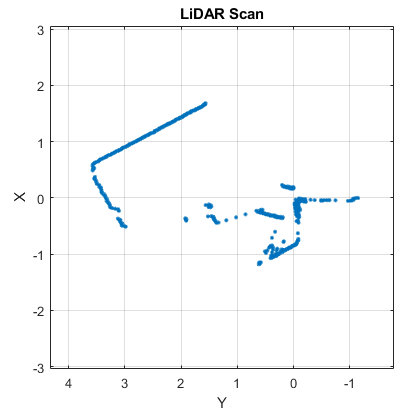
Plot all the points of the lidar scan.
plot(scan)
Input Arguments
Output Arguments
Version History
Introduced in R2024a