convhull
Convex hull
Syntax
Description
Examples
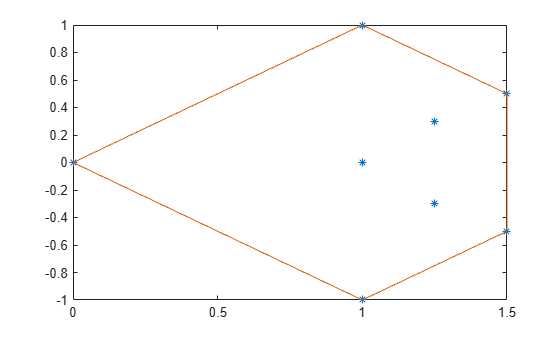
Create a matrix of 2-D points. Compute the convex hull and its area.
P = [0 0;
1 1;
1.5 0.5;
1.5 -0.5;
1.25 0.3;
1 0;
1.25 -0.3;
1 -1];
[k,av] = convhull(P);Plot the original points and the convex hull.
plot(P(:,1),P(:,2),"*") hold on plot(P(k,1),P(k,2)) hold off
Display the area.
av
av = 1.7500
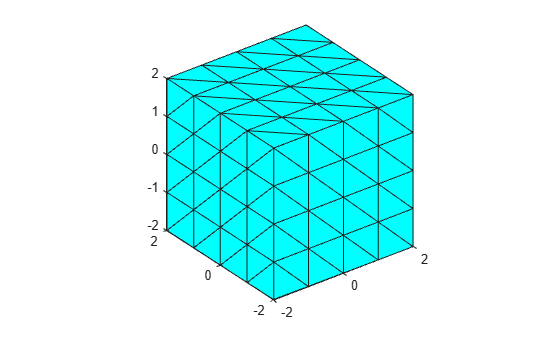
Simplify a 3-D convex hull by removing points that do not affect its volume.
Create a set of 3-D points.
[x,y,z] = meshgrid(-2:1:2,-2:1:2,-2:1:2); x = x(:); y = y(:); z = z(:);
Compute the convex hull and its volume.
[k1,av1] = convhull(x,y,z);
Plot the convex hull.
trisurf(k1,x,y,z,FaceColor="cyan") axis equal
Compute and plot a simplified version of the convex hull that contains fewer points, but preserves the volume.
[k2,av2] = convhull(x,y,z,Simplify=true); trisurf(k2,x,y,z,FaceColor="cyan") axis equal
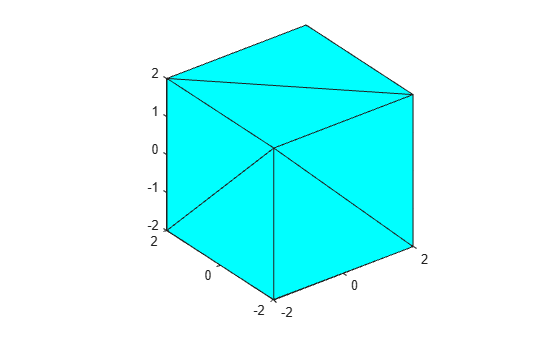
Display the volumes of both convex hulls. The volumes are the same, but the simplified convex hull uses fewer points.
av1
av1 = 64.0000
av2
av2 = 64
Input Arguments
Output Arguments
Tips
Extended Capabilities
Version History
Introduced before R2006a