Clarke Transform
Implement ab to αβ transformation
Libraries:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
Description
The Clarke Transform block computes the Clarke transformation of balanced
three-phase components in the abc reference frame and outputs the balanced
two-phase orthogonal components in the stationary αβ reference frame.
Alternatively, the block can compute Clarke transformation of three-phase components
a, b, and c and output the
components α, β, and 0. For a
balanced system, the zero component is equal to zero. Use the Number of
inputs parameter to use either two or three inputs.
When using two-input configuration, the block accepts two signals out of the three phases (abc), automatically calculates the third signal, and outputs the corresponding components in the αβ reference frame.
For example, the block accepts either a and b input values or the multiplexed input value abc where the phase-a axis aligns with the α-axis.
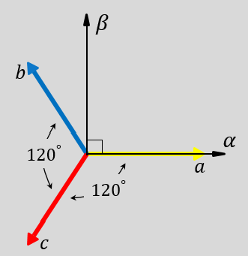
This figure shows the direction of the magnetic axes of the stator windings in the abc reference frame and the stationary αβ reference frame.
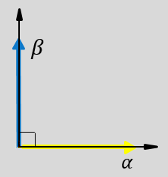
This figure shows the equivalent α and β components in the stationary αβ reference frame.
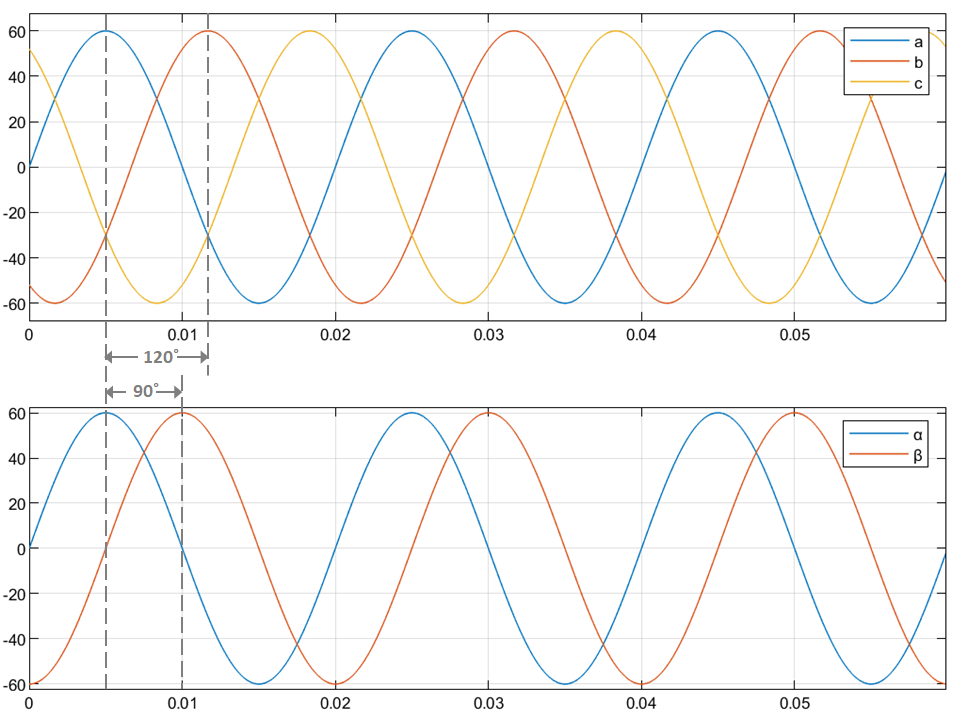
The time-response of the individual components of equivalent balanced abc and αβ systems.
Equations
The following equation describes the Clarke transform computation:
For balanced systems like motors, the zero sequence component calculation is always zero. For example, the currents of the motor can be represented as,
Therefore, you can use only two current sensors in three-phase motor drives, where you can calculate the third phase as,
By using these equations, the block implements the Clarke transform as,
where:
, , and are the balanced three-phase components in the abc reference frame.
and are the balanced two-phase orthogonal components in the stationary αβ reference frame.
is the zero component in the stationary αβ reference frame.
Examples

Field-Oriented Control of Induction Motor Using Speed Sensor
Implements the field-oriented control (FOC) technique to control the speed of a three-phase AC induction motor (ACIM). The FOC algorithm requires rotor speed feedback, which is obtained in this example by using a quadrature encoder sensor. For details about FOC, see Field-Oriented Control.

Field-Oriented Control of PMSM Using Hall Sensor
Implements the field-oriented control (FOC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a Hall sensor. For details about FOC, see Field-Oriented Control.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020a