Generate Code to Compute Optimal MPC Moves in MATLAB
This example shows how to use the mpcmoveCodeGeneration command to generate C code to compute optimal MPC control moves for real-time applications.
After simulating the controller using mpcmove, you use mpcmoveCodeGeneration to simulate the controller using optimized data structures, reproducing the same results. Then you generate an executable having the same inputs and outputs as mpcmoveCodeGeneration. Finally, you use the generated executable to simulate the controller, using the same code and data structures you used for mpcmoveCodeGeneration.
Plant Model
The plant is a single-input, single-output, stable, 2nd order linear plant.
plant = tf(5,[1 0.8 3]);
Set a sampling time of one second, convert the plant to discrete-time, state-space form, and specify a zero initial states vector.
Ts = 1; plant = ss(c2d(plant,Ts)); x0 = zeros(size(plant.B,1),1);
Design MPC Controller
Create an MPC controller with default horizons and the specified sampling time.
mpcobj = mpc(plant,Ts);
-->"PredictionHorizon" is empty. Assuming default 10. -->"ControlHorizon" is empty. Assuming default 2. -->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
Specify controller tuning weights.
mpcobj.Weights.MV = 0; mpcobj.Weights.MVrate = 0.5; mpcobj.Weights.OV = 1;
Specify initial constraints on the manipulated variable and plant output. These constraints will be updated at run time.
mpcobj.MV.Min = -1; mpcobj.MV.Max = 1; mpcobj.OV.Min = -1; mpcobj.OV.Max = 1;
Simulate Online Constraint Changes with mpcmove Command
In the closed-loop simulation, constraints are updated and fed into the mpcmove command at each control interval.
yMPCMOVE = []; uMPCMOVE = [];
Set the simulation time.
Tsim = 20;
Initialize the online constraint data.
MVMinData = -0.2-[1 0.95 0.9 0.85 0.8 0.75 0.7 0.65 0.6 0.55 0.5 ... 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1]; MVMaxData = 0.2+[1 0.95 0.9 0.85 0.8 0.75 0.7 0.65 0.6 0.55 0.5 ... 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1]; OVMinData = -0.2-[1 0.95 0.9 0.85 0.8 0.75 0.7 0.65 0.6 0.55 0.5 ... 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1]; OVMaxData = 0.2+[1 0.95 0.9 0.85 0.8 0.75 0.7 0.65 0.6 0.55 0.5 ... 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1];
Initialize plant states.
x = x0;
Initialize MPC states. Note that xmpc is a handle object pointing to the current (always updated) state of the controller.
xmpc = mpcstate(mpcobj);
-->Integrator added as output disturbance model for measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
Run a closed-loop simulation by calling mpcmove in a loop.
options = mpcmoveopt; for ct = 1:round(Tsim/Ts)+1 % Update and store plant output. y = plant.C*x; yMPCMOVE = [yMPCMOVE y]; % Update constraints. options.MVMin = MVMinData(ct); options.MVMax = MVMaxData(ct); options.OutputMin = OVMinData(ct); options.OutputMax = OVMaxData(ct); % Compute control actions and store plant input. u = mpcmove(mpcobj,xmpc,y,1,[],options); uMPCMOVE = [uMPCMOVE u]; % Update plant state. x = plant.A*x + plant.B*u; end
Validate Simulation Results with mpcmoveCodeGeneration Command
To prepare for generating code that computes optimal control moves from MATLAB®, it is recommended to reproduce the same control results with the mpcmoveCodeGeneration command before using the codegen command from the MATLAB® Coder™ product.
yCodeGen = []; uCodeGen = [];
Initialize plant states.
x = x0;
Create data structures to use with mpcmoveCodeGeneration using getCodeGenerationData.
[pars,state,ins] = getCodeGenerationData(mpcobj);
Run a closed-loop simulation by calling mpcmoveCodeGeneration in a loop.
for ct = 1:round(Tsim/Ts)+1 % Update and store plant output. y = plant.C*x; yCodeGen = [yCodeGen y]; % Update measured output in online data. ins.signals.ym = y; % Update reference in online data. ins.signals.ref = 1; % Update constraints in online data. ins.limits.umin = MVMinData(ct); ins.limits.umax = MVMaxData(ct); ins.limits.ymin = OVMinData(ct); ins.limits.ymax = OVMaxData(ct); % Compute and store control action. [u,state] = mpcmoveCodeGeneration(pars,state,ins); uCodeGen = [uCodeGen u]; % Update plant state. x = plant.A*x + plant.B*u; end
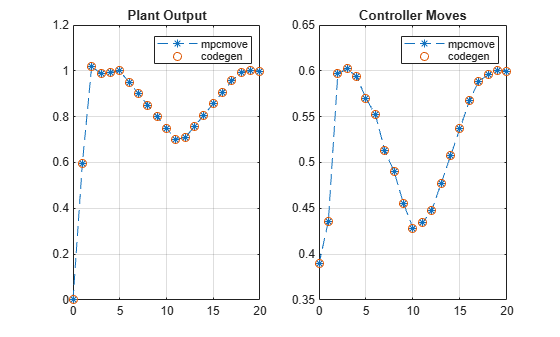
The simulation results are identical to those obtained using mpcmove.
t = 0:Ts:Tsim; figure; subplot(1,2,1) plot(t,yMPCMOVE,'--*',t,yCodeGen,'o'); grid legend('mpcmove','codegen') title('Plant Output') subplot(1,2,2) plot(t,uMPCMOVE,'--*',t,uCodeGen,'o'); grid legend('mpcmove','codegen') title('Controller Moves')
Generate MEX Function From mpcmoveCodeGeneration Command
To generate C code from the mpcmoveCodeGeneration command for use within libraries and executable files, in general, use the codegen command from MATLAB Coder.
When using codegen, you can change the code generation target to C/C++ static library, dynamic library, executable, etc. by using a different set of coder.config settings.
To specifically generate a MEX executable file, you can also use the buildMEX function. For this example, use buildMEX to generate the MEX function mpcmoveMEX to reproduce the simulation results in MATLAB.
When generating C code for the mpcmoveCodeGeneration command:
Because no data integrity checks are performed on the input arguments, you must make sure that all the input data has the correct types, dimensions, and values.
You must define the first input argument,
mpcmove_struct, as a constant when using thecodegencommand.The second input argument,
mpcmove_state, is updated by the command and returned as the second output. In most cases, you do not need to modify its contents and should simply pass it back to the command in the next control interval. The only exception is when custom state estimation is enabled, in which case you must provide the current state estimation using this argument.
Generate MEX function.
cfg = coder.config('mex'); cfg.EnableDynamicMemoryAllocation = 'off'; mexfun = buildMEX(mpcobj, 'mpcmoveMEX', pars, state, ins, cfg);
Generating MEX function "mpcmoveMEX" from linear MPC to speed up simulation. Code generation successful. MEX function "mpcmoveMEX" successfully generated.
Initialize data storage.
yMEX = []; uMEX = [];
Initialize plant states.
x = x0;
Use getCodeGenerationData to create data structures to use with mpcmoveCodeGeneration.
[pars,state,ins] = getCodeGenerationData(mpcobj);
Run a closed-loop simulation by calling the generated mpcmoveMEX functions in a loop.
for ct = 1:round(Tsim/Ts)+1 % Update and store the plant output. y = plant.C*x; yMEX = [yMEX y]; % Update measured output in online data. ins.signals.ym = y; % Update reference in online data. ins.signals.ref = 1; % Update constraints in online data. ins.limits.umin = MVMinData(ct); ins.limits.umax = MVMaxData(ct); ins.limits.ymin = OVMinData(ct); ins.limits.ymax = OVMaxData(ct); % Compute and store control action. [u,state] = mpcmoveMEX(state,ins); uMEX = [uMEX u]; % Update plant state. x = plant.A*x + plant.B*u; end
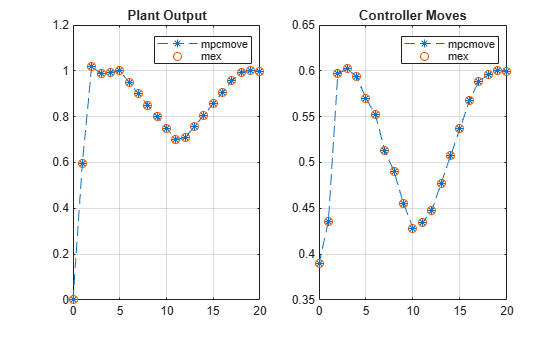
The simulation results are identical to those obtained using mpcmove.
figure subplot(1,2,1) plot(t,yMPCMOVE,'--*',t,yMEX,'o') grid legend('mpcmove','mex') title('Plant Output') subplot(1,2,2) plot(t,uMPCMOVE,'--*',t,uMEX,'o') grid legend('mpcmove','mex') title('Controller Moves')
See Also
Functions
Objects
mpc|mpcstate|mpcmoveopt