Localization and Pose Estimation
Use localization and pose estimation algorithms to orient your vehicle in your environment. Inertial sensor fusion uses filters to improve and combine sensor readings for IMU, GPS, and others. Localization algorithms, like Monte Carlo Localization and scan matching, estimate your pose in a known map using range sensor or lidar readings. Pose graphs track your estimated poses and can be optimized based on edge constraints and loop closures.
To model specific sensors, see Sensor Models.
For simultaneous localization and mapping, see SLAM.
Categories
- Inertial Sensor Fusion
Inertial navigation with IMU and GPS, sensor fusion, custom filter tuning
- Localization Algorithms
Particle filters, scan matching, Monte Carlo localization, pose graphs, odometry
Featured Examples

IMU and GPS Fusion for Inertial Navigation
How you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicles (UAVs) or quadcopters.

Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. In this example, you:

Estimate Phone Orientation Using Sensor Fusion
MATLAB® Mobile™ reports sensor data from the accelerometer, gyroscope, and magnetometer on Apple or Android® mobile devices. Raw data from each sensor or fused orientation data can be obtained. This example shows how to compare the fused orientation data from the phone with the orientation estimate from the ahrsfilter object.
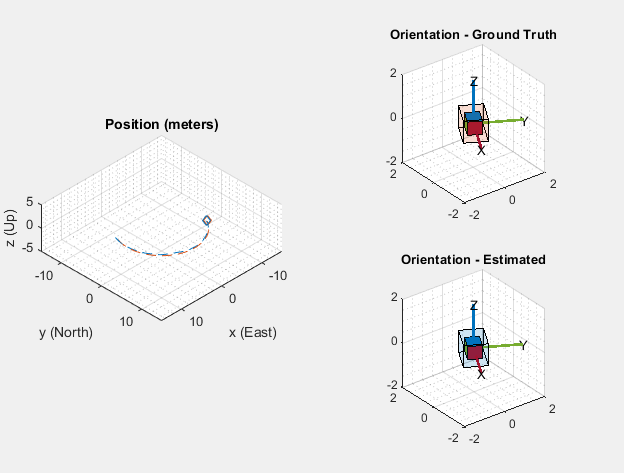
Estimate Position and Orientation of a Ground Vehicle
Estimate the position and orientation of ground vehicles by fusing data from an inertial measurement unit (IMU) and a global positioning system (GPS) receiver.

Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

Reduce Drift in 3-D Visual Odometry Trajectory Using Pose Graphs
Reduce the drift in the estimated trajectory (location and orientation) of a monocular camera using 3-D pose graph optimization. Visual odometry estimates the current global pose of the camera (current frame). Because of poor matching or errors in 3-D point triangulation, robot trajectories often tends to drift from the ground truth. Loop closure detection and pose graph optimization reduce this drift and correct for errors.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.