transformMotion
Compute motion quantities between two relatively fixed frames
Syntax
Description
[
computes motion quantities of the sensor frame relative to the navigation frame
(posS,orientS,velS,accS,angvelS] = transformMotion(posSFromP,orientSFromP,posP)posS, orientS, velS,
accS, and angvelS) using the position of sensor
frame relative to the platform frame, posSFromP, the orientation of the
sensor frame relative to the platform frame, orientSFromP, and the
position of the platform frame relative to the navigation frame, posP.
Note that the position and orientation between the sensor frame and the platform frame are
assumed to be fixed. Also, the unspecified quantities between the navigation frame and the
platform frame (such as orientation, velocity, and acceleration) are assumed to be
zero.
[___] = transformMotion(
additionally specifies the orientation of the platform frame relative to the navigation
frame, posSFromP,orientSFromP,posP,orientP)orientP. The output arguments are the same as those of the
previous syntax.
[___] = transformMotion(
additionally specifies the velocity of the platform frame relative to the navigation frame,
posSFromP,orientSFromP,posP,orientP,velP)velP. The output arguments are the same as those of the previous
syntax.
[___] = transformMotion(
additionally specifies the acceleration of the platform frame relative to the navigation
frame, posSFromP,orientSFromP,posP,orientP,velP,accP)accP. The output arguments are the same as those of the previous
syntax.
[___] = transformMotion(
additionally specifies the angular velocity of the platform frame relative to the navigation
frame, posSFromP,orientSFromP,posP,orientP,velP,accP,angvelP)angvelP. The output arguments are the same as those of the
previous syntax.
Examples
Input Arguments
Output Arguments
More About
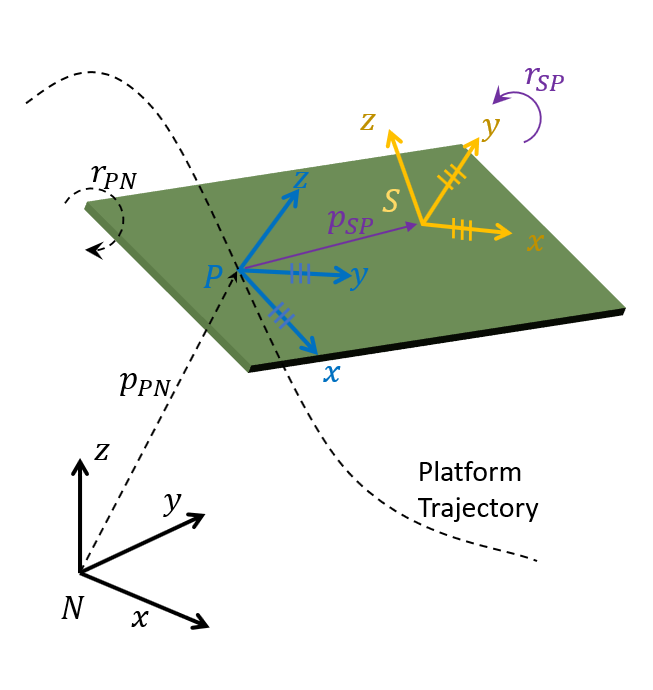
The transformMotion function calculates the motion quantities of the
sensor frame (S), which is fixed on a rigid platform, relative to the
navigation frame (N) using the mounting information of the sensor on the
platform and the motion information of the platform frame (P).
As shown in the figure, the position and orientation of the platform frame and the sensor frame are fixed on the platform. The position of the sensor frame relative to the platform frame is pSP, and the orientation of the sensor frame relative to the platform frame is rSP. Since the two frames are both fixed, pSP and rSP are constant.
To compute the motion quantities of the sensor frame relative to the navigation frame, the quantities describing the motion of the platform frame relative to the navigation frame are required. These quantities include: the platform position (pPN), orientation (rPN), velocity, acceleration, angular velocity, and angular acceleration relative to the navigation frame. You can specify these quantities through the function input arguments except the angular acceleration, which is always assumed to be zero in the function. The unspecified quantities are also assumed to be zero.
Version History
Introduced in R2020a