Ideal Translational Motion Sensor
Motion sensor in mechanical translational systems

Libraries:
Simscape /
Foundation Library /
Mechanical /
Mechanical Sensors
Description
The Ideal Translational Motion Sensor block represents a device that converts an across variable measured between two mechanical translational nodes into a control signal proportional to acceleration, velocity, or position. You can specify the initial position (offset) as a block parameter.
The sensor is ideal since it does not account for inertia, friction, delays, energy consumption, and so on.
Connections R and C are mechanical translational conserving ports that connect the block to the nodes where motion is being monitored. The block positive direction is from port R to port C. This means that the velocity is measured as v = vR – vC, where vR, vC are the absolute velocities at ports R and C, respectively. The Measurement reference parameter lets you disable port C and measure with respect to ground.
Connections A, V, and P are physical signal output ports for acceleration, velocity, and position, respectively. The visibility of these ports is controlled by block parameters. If you enable port A, the block performs additional computations, to measure acceleration based on velocity. To avoid unnecessary model complexity, it is recommended that in each instance of the block you enable only the ports that you actually use for measurement.
Examples

Mass-Spring-Damper with Controller
A controlled mass-spring-damper. A controller adjusts the force on the mass to have its position track a command signal. The initial velocity for the mass is 10 meters per second. The controller adjusts the force applied by the Force Source to track the step changes to the input signal.

Linkage Mechanism
The use of the Simscape™ Lever block in a linkage mechanism. Lever 1 and Lever 4 are first class levers with the fulcrum at the end. Lever 3 is a second class lever with the fulcrum in the middle. Lever 2 is a summing lever driven by the first and the third levers.
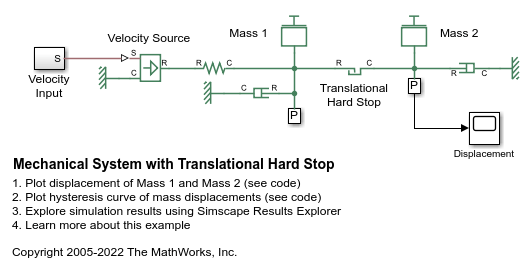
Mechanical System with Translational Hard Stop
Two masses connected by a hard stop. Mass 1 is driven by an Ideal Velocity Source. As the velocity input changes direction, Mass 2 will stay at rest until Mass 1 reaches the other end of the backlash modeled by the Translational Hard Stop. Plotting the displacement of Mass 2 against the displacement of the Mass 1 produces a typical hysteresis curve.