Disturbance Compensator
Modify control actions to compensate for unknown dynamics and disturbances
Since R2024a

Libraries:
Simulink Control Design /
Disturbance Observer
Description
Use the Disturbance Compensator block to modify control actions of a nominal controller to reject and compensate for disturbances in your model. To compensate for disturbances, the Disturbance Compensator block uses an extended state observer to estimate total disturbances in the model and returns the modified controller actions you can use as plant input.
The block extends the implementation of ESO as follows.
Here:
x is the plant states.
is the state derivative in continuous time and x+ is the state update x[k+1] in discrete time.
A, Bu, and Cm are the plant dynamics.
ym is the measurable plant output.
Bd is the disturbance input matrix.
d is the total disturbances in the model, including unknown dynamics and internal and external disturbances.
u is the modified controller action.
u0 is the nominal controller action.
Kd is the compensation gain matrix.
The block does not require you to provide an actual model of the plant. You can specify the dynamics obtained from a physical representation or an approximation of the plant. Therefore, the accuracy of disturbance rejection will depend on the accuracy of the plant approximation you provide.
For more information, see Control Design and Disturbance Compensation Using Extended State Observers.
Examples
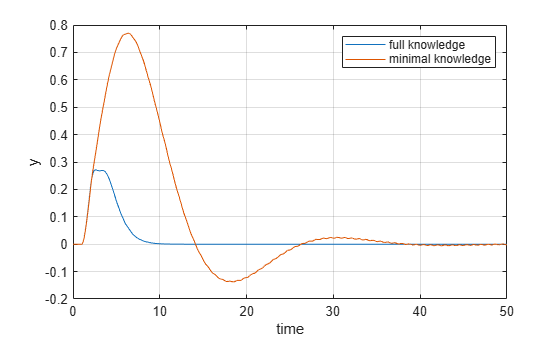
Compensate for Disturbances in Spring-Mass-Damper System
Compensate for disturbances in a spring-mass-damper system using the Disturbance Compensator block.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2024a