Simplified Synchronous Machine
Simplified synchronous machine with electromotive force

Libraries:
Simscape /
Electrical /
Electromechanical /
Synchronous
Description
The Simplified Synchronous Machine block models a simplified synchronous machine with a voltage source that represents electromotive force (EMF). You can specify the internal resistance and inductance with per-unit or SI parameters.
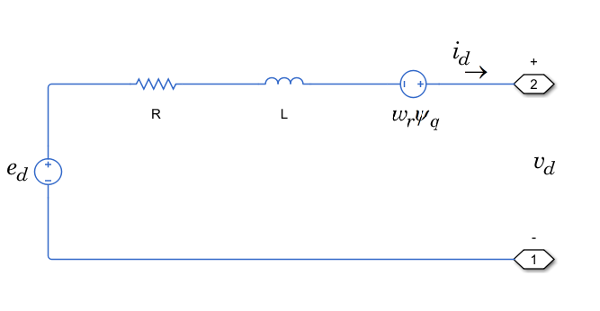
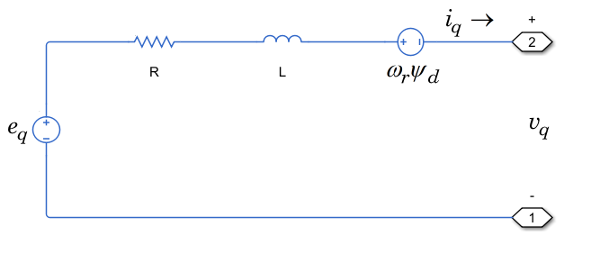
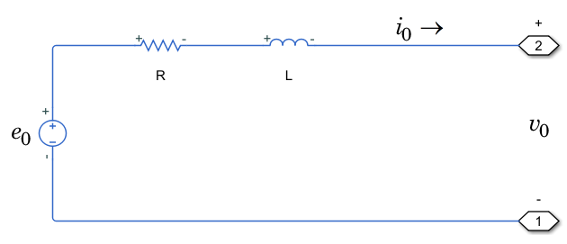
The equivalent circuits of the simplified synchronous machine for the direct axis, the quadrature axis, and the zero sequence are:
Equations
The simplified synchronous machine equations are expressed with respect to a rotating reference frame, which is defined by:
where:
θe is the electrical angle.
N is the number of pole pairs.
θr is the rotor angle.
The Park transformation maps the synchronous machine equations to the rotating reference frame with respect to the electrical angle. The Park transformation is defined by:
The Park transformation is used to define the per-unit simplified synchronous machine equations. The voltage equations are defined by:
where:
ed, eq, and e0 are the d-axis, q-axis, and zero-sequence voltages, defined by:
ea, eb, and ec are the per-unit internal voltage sources, defined by:
epu is the per-unit amplitude of the internal generated voltage.
vd, vq, and v0 are defined by:
va, vb, and vc are the stator voltages measured from port ~ to neutral port n.
ωbase is the per-unit base electrical speed.
ψd, ψq, and ψ0 are the d-axis, q-axis, and zero-sequence flux linkages.
ωr is the per-unit rotor rotational speed.
R is the stator resistance.
id, iq, and i0 are the d-axis, q-axis, and zero-sequence stator currents, defined by:
ia, ib, and ic are the stator currents flowing out of port ~.
The stator flux linkage equations are defined by
where L is the stator leakage inductance.
The power equation of the simplified synchronous machine in per-unit is defined by:
Plotting and Display Options
You can perform these plotting and display actions by clicking the associated button next to these parameters in the Utilities section:
Base values — Display the machine per-unit base values in the MATLAB® Command Window.
Associated initial conditions — Display the associated initial conditions in the MATLAB Command Window.
Model Thermal Effects
You can expose thermal ports to model the effects of generated heat and machine temperature. To expose the thermal ports, set the Modeling option parameter to either:
No thermal port— The block does not contain thermal ports.Show thermal port— The block contains multiple thermal conserving ports.
For more information about using thermal ports in actuator blocks, see Simulating Thermal Effects in Rotational and Translational Actuators.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
For this block, the Initial Targets settings are visible only if, in
the Initial Conditions section, you set the Initialization
option parameter to Set targets for rotor angle and Park's
transform variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see System Scaling by Nominal Values.