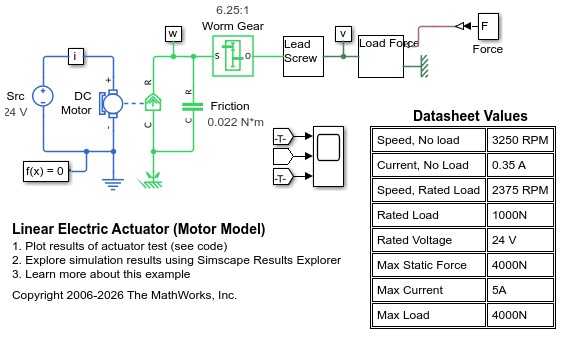
Linear Electric Actuator (Motor Model)
This model shows how to develop a model of an uncontrolled linear actuator using datasheet parameter values. The actuator consists of a DC motor driving a 6.25:1 worm gear which in turn drives a 3mm lead screw to produce linear motion. Manufacturer data for the actuator defines the no-load linear speed (26mm/s), rated load (1000N), rated-load linear speed (19mm/s), and maximum current (5A). The maximum static force is 4000N and the rated voltage is 24V DC.
If friction and rotor damping are neglected, the DC Motor mask parameters can be calculated as follows. A no-load speed of 26mm/s is equivalent to (26/3)*6.25*60=3250rpm. The rated motor speed is (19/3)*6.25*60=2375rpm, and the rated power is 1000N*19e-3m/s=19W. To run the model based on these parameters, set the DC Motor Model parameterization parameter to By rated power, rated speed & no-load speed and comment out the Friction block. The results validate the speeds for zero and 1000N load, but under-predict the maximum current and maximum static force.
For a more accurate approximation of the motor, friction effects must be included. The no-load and rated-load speed information depends on the unknown friction levels, so instead we parameterize the motor in terms of the maximum current which occurs when the rotor is locked (i.e. no back emf). Then the winding resistance is given by rated voltage divided by maximum current i.e. 24V/5A = 4.8 ohms. The no-load current, measured to be 0.35A, indirectly provides information about the friction. Given this value, the torque constant is given by maximum static torque divided by the net useful current i.e. (4000N*3e-3m/s/(2*pi*6.25))/(5A-0.35A) = 0.066Nm/A. To run the model based on these parameters, set the DC Motor Model Parameterization parameter to By equivalent circuit parameters and reinstate the Friction block. The torsional friction must now be determined such that the no-load speed is 26mm/s. A value of 0.022Nm is required to achieve this. The model also confirms maximum current is 5A and maximum linear force is 4000N.
Note that a limitation of this model is that the load can back drive the motor through the worm gear. A more detailed friction model would be required to prevent this.
Model
Simulation Results from Simscape Logging
The plot below shows the performance of the motor compared to values found on the datasheet for a linear actuator. The test includes no load, rated load, and max load. The motor speed and currents match the specification closely, indicating that we have assigned parameter values that match the datasheet.

Results from Real-Time Simulation
This example has been tested on these platforms:
Speedgoat™ Performance real-time target machine with an Intel® 3.5 GHz i7 multi-core CPU and 4 GB RAM.
dSPACE® SCALEXIO LabBox with Intel® Core XEON E3-1275v3 at 3.5GHz and 4 GB RAM.
You can run this model in real time with a step size of 20 microseconds by using the Simscape local solver. For small sample rates, a task overrun might occur during the initial task execution due to a cold cache. To avoid this overrun, if the selected platform supports these options, relax the start-up behavior by specifying a limited number of task overruns or increasing the sample time of periodic tasks during the start-up phase of the real-time application.