checkStatus
Description
Examples
Perform monocular visual simultaneous localization and mapping (vSLAM) using the data from the TUM RGB-D Benchmark. You can download the data to a temporary directory using a web browser or by running this code:
baseDownloadURL = "https://cvg.cit.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir,"tum_rgbd_dataset",filesep); options = weboptions(Timeout=Inf); tgzFileName = dataFolder+"fr3_office.tgz"; folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder) disp("Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.") websave(tgzFileName,baseDownloadURL,options); % Extract contents of the downloaded file disp("Extracting fr3_office.tgz (1.38 GB) ...") untar(tgzFileName,dataFolder); end
Create an imageDatastore object to store all the RGB images.
imageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/rgb/";
imds = imageDatastore(imageFolder);Specify your camera intrinsic parameters, and use them to create a monocular visual SLAM object.
intrinsics = cameraIntrinsics([535.4 539.2],[320.1 247.6],[480 640]); vslam = monovslam(intrinsics,SkipMaxFrames=15);
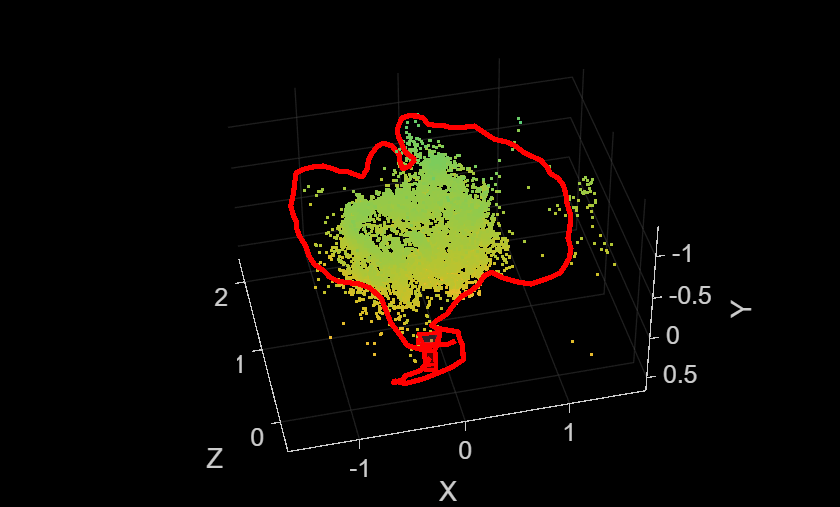
Process each image frame, and visualize the camera poses and 3-D map points. Note that the monovslam object runs several algorithm parts on separate threads, which can introduce a latency in processing of an image frame added by using the addFrame function.
for i = 1:numel(imds.Files) addFrame(vslam,readimage(imds,i)) if hasNewKeyFrame(vslam) % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); end
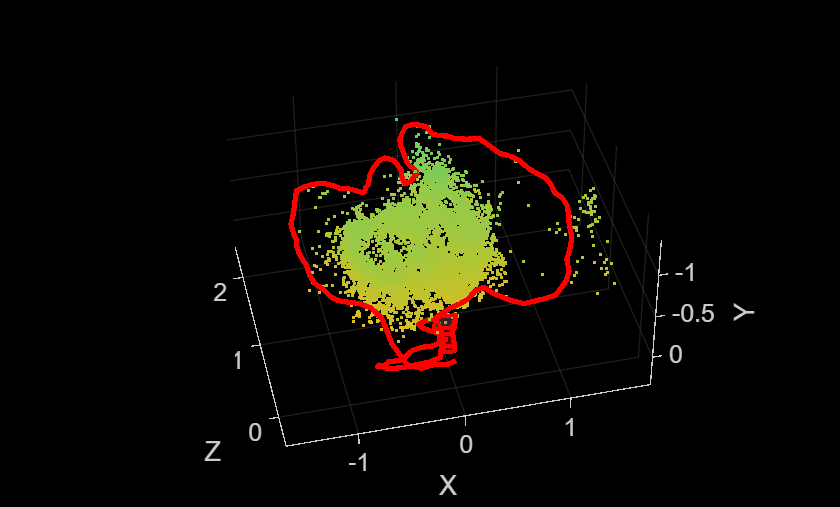
Plot intermediate results and wait until all images are processed.
while ~isDone(vslam) if hasNewKeyFrame(vslam) plot(vslam); end end
After all the images are processed, you can collect the final 3-D map points and camera poses for further analysis.
xyzPoints = mapPoints(vslam);
[camPoses,addedFramesIdx] = poses(vslam);
% Reset the system
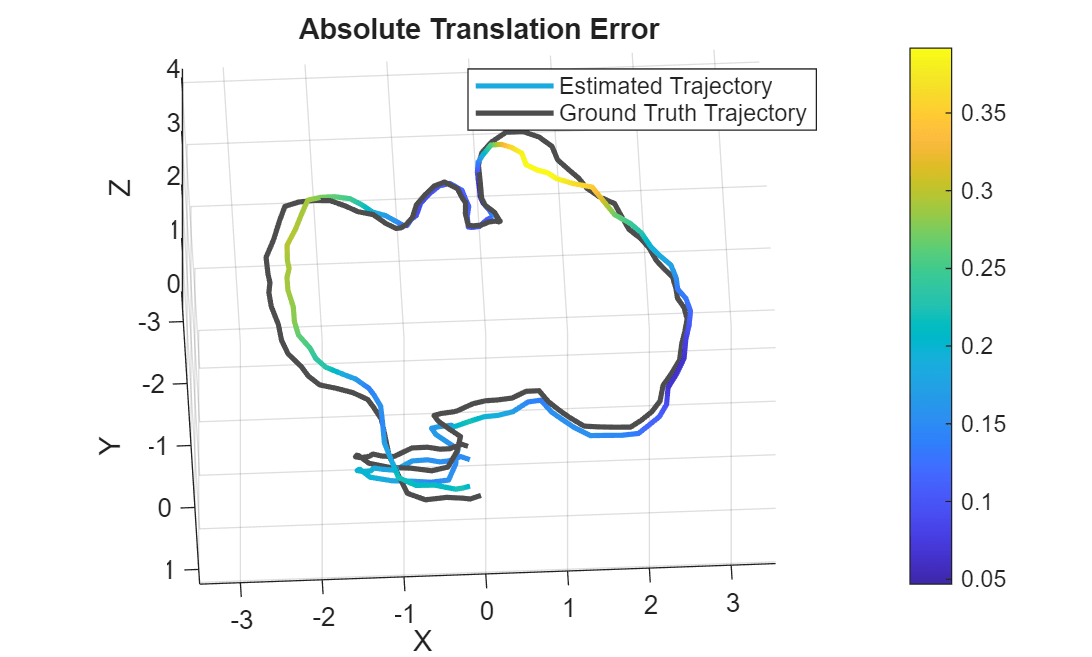
reset(vslam)Compare the estimated camera trajectory with the ground truth to evaluate the accuracy.
% Load ground truth gTruthData = load("orbslamGroundTruth.mat"); gTruth = gTruthData.gTruth; % Evaluate tracking accuracy mtrics = compareTrajectories(camPoses, gTruth(addedFramesIdx), AlignmentType="similarity"); disp(['Absolute RMSE for key frame location (m): ', num2str(mtrics.AbsoluteRMSE(2))]);
Absolute RMSE for key frame location (m): 0.043641
% Plot the absolute translation error at each key frame figure ax = plot(mtrics, "absolute-translation"); view(ax, [2.70 -49.20]);
Input Arguments
Output Arguments
Version History
Introduced in R2023b