view
Display point cloud
Syntax
Description
Examples
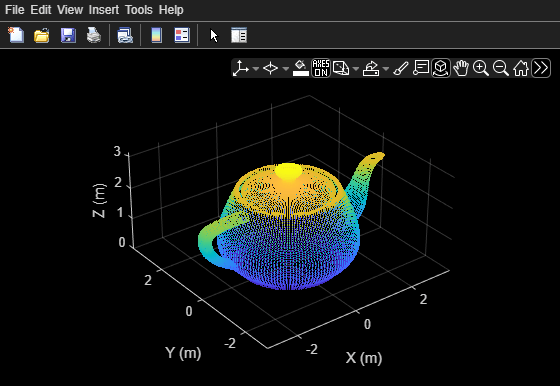
Load point cloud.
ptCloud = pcread("teapot.ply");Define a rotation matrix and 3-D transform.
x = pi/180;
R = [ cos(x) sin(x) 0 0
-sin(x) cos(x) 0 0
0 0 1 0
0 0 0 1];
tform = affine3d(R);Compute x, y, and z limits that ensure that the rotated teapot is not clipped.
lower = min([ptCloud.XLimits ptCloud.YLimits]); upper = max([ptCloud.XLimits ptCloud.YLimits]); xlimits = [lower upper]; ylimits = [lower upper]; zlimits = ptCloud.ZLimits;
Create the player and customize player axis labels.
player = pcplayer(xlimits,ylimits,zlimits); xlabel(player.Axes,"X (m)"); ylabel(player.Axes,"Y (m)"); zlabel(player.Axes,"Z (m)");
Rotate the teapot around the z-axis.
for i = 1:360 ptCloud = pctransform(ptCloud,tform); view(player,ptCloud); end
Input Arguments
Point cloud, specified as a pointCloud object. The object
contains the locations, intensities, and RGB colors to render the point
cloud.
| Point Cloud Property | Color Rendering Result |
|---|---|
Location only | Maps the z-value to a color value in the current color map. |
Location and
Intensity | Maps the intensity to a color value in the current color map. |
Location and
Color | Use provided color. |
Location,
Intensity, and
Color | Use provided color. |
Player for visualizing 3-D point cloud data streams, specified as a
pcplayer object.
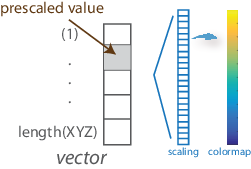
Point cloud x, y, and
z locations, specified as either an
M-by-3 or an
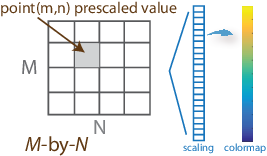
M-by-N-by-3 numeric matrix. The
M-by-N-by-3 numeric matrix is
commonly referred to as an organized point cloud. The
xyzPoints numeric matrix contains
M or M-by-N
[x,y,z] points.
The z values in the numeric matrix, which generally
correspond to depth or elevation, determine the color of each point.
Color for points in the point cloud, specified as a 1-by-3-RGB vector, an M-by-3 matrix, an M-by-N-by-3 matrix, a short color name, or a long color name. For details on color values, see the Color Value table.
For
singleordoubledatatype, theColorRGB value must be specified in the range [0, 1].For
uint8datatype, theColorRGB value must be specified in the range [0, 255].The function stores the
Colorvalue as either an M-by-3 or M-by-N-by-3. If you specify the color as a string or a 1-by-3 vector, the function converts it to one of these dimensions.
| Color | Format | Example |
|---|---|---|
| Specify one color for all points | short or long color name |
|
1-by-3 vector (RGB triplet) |
| |
| Specify a color for each point | cell array of character vectors |
|
M-by-3 matrix, as a list of RGB values | 255 0 0 255 0 0 0 255 255  | |
M-by-N-by-3 matrix for an organized point cloud containing RGB values for each point, where M-by-N is the dimension of the point cloud. |
|


More About
| Color Name | Short Name | RGB Triplet | Appearance |
|---|---|---|---|
"red" | "r" | [1 0 0] |
|
"green" | "g" | [0 1 0] |
|
"blue" | "b" | [0 0 1] |
|
"cyan"
| "c" | [0 1 1] |
|
"magenta" | "m" | [1 0 1] |
|
"yellow" | "y" | [1 1 0] |
|
"black" | "k" | [0 0 0] |
|
"white" | "w" | [1 1 1] |
|
Version History
Introduced in R2015b