Results for
Hi,
I was wondering if anyone could help me with how I can simplify this part of my script, specifically scenario 1-3, so that it is easier to read. Perhaps with functions etc. (the comments are in swedish sorry heh. But the script works).
Thanks in advance!
F1_batt_till_P19 = zeros(8760,length(Effekt)); % det som batteriet laddar upp fastigheten med
F1_Elkons_batt = zeros(8760,length(Effekt)); % konsumtionen från nätet av batteriet
F1_batterilast_tot = zeros(8760,length(Effekt)); % batterilasten lagras kontenueligt.
F1_elkonsum = [];
for k = 1: length(Effekt) % går igenom alla olika effekter mellan 100 - 1000 kW
F1_last_batt = 0; % batteriet måste nollas efter varje ny effekt.
batterikapacitet = Kapacitet(k); % såhär stort är batteriet beroende på effekten. Beror på C rate (blir dubbelt så stort som effekten).
batterikapacitet_min = batterikapacitet * SOC_low/100; % undre gräns
batterikapacitet_max = batterikapacitet *SOC_high/100; % övre gräns
F1_last_batt = batterikapacitet_min; % hur mycket kapacitet har batteriet. Finns det något . Börjar tomt.
for i = 1:12 % gå igenom månaderna
mon = [31,28,31,30,31,30,31,31,30,31,30,31];
slut = mon(i)*24;
% medelkonsumtionen (i kW) per månad Elkons_months_eft(744,12)
medel_kons = mean(Elkons_months_eft(1:slut, i)); % Månadens medelkonsumtion
for m = 1:slut % gå igenom timmarna per månad
% går igenom varje timme (m), för varje månad (i).
% scenario 1 - batteriet laddar ur till medelvärdet
if Elkons_months_eft(m,i) > medel_kons
topp = Elkons_months_eft(m,i) - medel_kons; % storleken på toppen över medelvärde
% Om batteriet inte är tomt från början. Om det kan laddas ur.
if F1_last_batt > batterikapacitet_min
% Om batteriet kan laddas ur med hela efffekten utan att gå under min
if (F1_last_batt - Effekt(k)) >= batterikapacitet_min
% Om toppen är större eller lika med än vad som får kapas med batteriet - hela effekten används.
if topp >= Effekt(k) % A
F1_batt_till_P19( (24*sum(mon(1:i-1)) + m) ,k) = Effekt(k); % effekt under timmen som batteriet tillgodoser till Pyramiden 19
F1_last_batt = F1_last_batt - Effekt(k); % batteriet laddas ur med hela effekten den timmen
% Om toppen inte är större än effekten - hela toppen kapas.
else % B
F1_batt_till_P19((24*sum(mon(1:i-1)) + m) ,k) = topp;
F1_last_batt = F1_last_batt - topp;
end
% Om batteriet inte kan tömmas med hela effekten.
else
liten_effekt = F1_last_batt - batterikapacitet_min; % mängden som kan laddas ur.
% Om toppen är större än det vi kan använda – allt som är kvar används
if topp >= liten_effekt % C
F1_batt_till_P19((24*sum(mon(1:i-1)) + m) , k) = liten_effekt; % effekt under timmen som batteriet tillgodoser till Pyramiden 19
F1_last_batt = F1_last_batt - liten_effekt; % batteriet laddas ur till min
% Om toppen inte är större än det vi kan använda - hela toppen kapas
else % D
F1_batt_till_P19( (24*sum(mon(1:i-1)) + m) ,k) = topp;
F1_last_batt = F1_last_batt - topp;
end
end
end
% scenario 2 - batteriet laddar upp och tar från nätet
elseif Elkons_months_eft(m,i) < medel_kons
% Om batteriet inte är fullt
if F1_last_batt < batterikapacitet_max
% Om det får plats en laddning av hela effekten – Batteriet laddas upp
if (F1_last_batt + Effekt(k)) <= batterikapacitet_max
% Om uppladdningen inte överstiger medelvärdet – Batteriet laddas upp med effekten
if (Elkons_months_eft(m,i) + Effekt(k)) <= medel_kons % A
F1_Elkons_batt((24*sum(mon(1:i-1)) + m),k) = Effekt(k); % mängden som tas från nätet
F1_last_batt = F1_last_batt + Effekt(k);
% Om uppladdningen överstiger medelvärdet – Batteriet laddas upp med det som går
else % B
till_medel = medel_kons - Elkons_months_eft(m,i);
F1_Elkons_batt((24*sum(mon(1:i-1)) + m),k) = till_medel;
F1_last_batt = F1_last_batt + till_medel;
end
% Om det får plats mindre än hela efffekten i en laddning – Batteriet laddas fullt
else
plats = batterikapacitet_max - F1_last_batt; % det som får plats i batteriet
% Om elkonsumtionen ej överstiger medelvärdet – Batteriet laddas upp till max-taket
if (Elkons_months_eft(m,i) + plats) <= medel_kons % C
F1_Elkons_batt((24*sum(mon(1:i-1)) + m),k) = plats;
F1_last_batt = F1_last_batt + plats;
% Om elkonsumtionen överstiger medelvärdet – Batteriet laddas upp med det som går
else % D
till_medel = medel_kons - Elkons_months_eft(m,i);
F1_Elkons_batt((24*sum(mon(1:i-1)) + m),k) = till_medel;
F1_last_batt = F1_last_batt + till_medel;
end
end
end
% scenario 3 - om inget händer
elseif Elkons_months_eft(m,i) == medel_kons
% inget händer. Precis som jag vill ha det.
end
F1_batterilast_tot((24*sum(mon(1:i-1)) + m),k) = F1_last_batt; % lägger in batterilasten för timmen i en lista.
end % slut - for timmar per mån (m)
end %slut for - månaderna (i)
% tar bort den sista uppladdningen av batteriet så det kommer ner till min värdet iaf
% får ta bort min värdet kostnaden sen manuellt.
for p = 0:(8760-1)
% Om batteriet har laddning över min kvar i slutet
if F1_last_batt > batterikapacitet_min
over = F1_last_batt - batterikapacitet_min;
% Om platsen är större än eller lika med laddningen på batteriet – Batteriet töms ner till min
if F1_Elkons_batt(end-p,k) >= over
F1_Elkons_batt(end-p,k) = F1_Elkons_batt(end-p,k) - over;
F1_last_batt = batterikapacitet_min;
F1_batterilast_tot(end-p,k) = batterikapacitet_min;
% Om platsen är mindre än laddningen på batteriet – Batteriet töms med hela platsen
elseif F1_Elkons_batt(end-p,k) < over
F1_last_batt = F1_last_batt - F1_Elkons_batt(end-p,k);
F1_batterilast_tot(end-p,k) = batterikapacitet_min;
F1_Elkons_batt(end-p,k) = 0;
end
end
end
end % slut for - effekt (k)
% summerar ihop året till ett värde. Får ett värde för varje effekt.
F1_elkonsum_sum =[];
F1_batt_till_P19_sum =[];
F1_Elkons_batt_sum = [];
F1_effekttopp_medel_year = []; % medel effekttopp under året
for v = 1:length(Effekt)
F1_elkonsum(:,v) = (Elkonsumtion_eft(:,1) - F1_batt_till_P19(:,v)) + F1_Elkons_batt(:,v); % elnätskonsumtion under året
F1_elkonsum_sum(v) = sum(F1_elkonsum(:,v));
F1_batt_till_P19_sum(v) = sum(F1_batt_till_P19(:,v));
F1_Elkons_batt_sum(v) = sum(F1_Elkons_batt(:,v));
end
% figure; yyaxis right; plot(F1_elkonsum(:,20));
% hold on; plot(Elkonsumtion_eft(:,1));
% hold on; yyaxis left; plot(F1_batterilast_tot(:,20)); legend('Konsum','ladd');
% Beräknar maxeffekten (toppen) för varje månad för alla effekter. Blir en 12 x length(effekt) lista
% Den går per rad och tar maxeffekten för månaden för alla kolumner = för alla olika effekter.
F1_effekttopp_months = zeros(12,length(Effekt)); % effekttopp under månaden för alla olika effekter.
mon = [31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31];
for b = 1:12
F1_effekttopp_months(b,:) = max(F1_elkonsum( (24*sum(mon(1:b-1)) + 1) : 24*sum(mon(1:b)) , : ) ); % [kW]
end
% beräknar medeleffekten för året
for v = 1:length(Effekt)
F1_effekttopp_medel_year(v) = mean(F1_effekttopp_months(:,v));
end
Hi, I'm losing comms with thingspeak after exactly one hour. I'm on the free plan while I evaluate TS.
I am sending data once a minute. It works fine for one hour, and I get 200-OK responses. After exactly 1 hour, the response from TS is a 404-not found. I do a new DNS lookup, and get a new IP address for TS. Still no response. I do more DNS lookups, and get another different IP address. It cycles through 3 different IP addresses, but noe of them work one hour after bootup on my device.
I'm running an Arduino Nano with an Ethercard and the JNH library. I can still ping the arduino, serve webpages and ping a monitored device, and get NTP time, all in a 1 minute loop, so I doubt the TCP/IP stack has crashed.
after I restart the device, it works again for exactly one hour, and the I lose comms with Thingspeak again.
Any help would be appreciated!
Thanks,
Adrian
In my struggle to get my SIM7600 connected to thingspeak using MQTT, i went to the basics: simple testing of my connection:
I use this site : https://testclient-cloud.mqtt.cool
Protocol :tcp
Host : mqtt3.thingspeak.com
Port : 1883
Username : got it from my device (double checked !)
Password : got it from my device (double checked !)
When i try to connect I get the message Connection refused : bad user name or password.
I am completely lost. What basic stupi mistake am i missing. I thoroughly read the MQTT help pages.
Any help is appreciated.
Update :
When i select Dedicated connection and i also fill in the will message and will topic, i am able to update my channel. At least some progress.
my Channel ID 2305210 and Channel ID 2300906 are not working properly. Pl.Guide me
Hi there,
I hope someone can help me on this.
I have written a code to connect my SIM7600 to Thingspeak using MQTT. It is basically an aruidino code. All instructions are echo's with an OK message so assume those instrictions are correct. However, the final step, publishing the message to the MQTT server return an error : CMQTTCONNLOST : 0,1.
Any idea which instructions might be wron?
I included the commands send.
10:09:09.031 -> AT+CMQTTPUB=0,0,60,0,0
10:09:09.031 -> +CMQTTPUB: 0,0
10:09:09.031 ->
10:09:09.031 -> OK
10:09:09.031 ->
10:09:09.031 -> +CMQTTCONNLOST: 0,1
The program :
SerialAT.begin(115200, SERIAL_8N1, RXD2, TXD2);
delay(1000);
SerialAT.println("AT+CRESET"); // Reset the SIM7600 module
Read_Response(30000);
SerialAT.println("AT+IPR=115200"); // Set Baudrate of the SIM7600 module
Read_Response(30000);
SerialAT.println("AT+CSQ"); // Check signal level
Read_Response(10000);
SerialAT.println("AT+COPS?"); // Query network information
Read_Response(10000);
SerialAT.println("AT+CMQTTSTOP"); //Stop MQTT service
Read_Response(10000);
SerialAT.println("AT+CMQTTSTART"); //Start MQTT service
Read_Response(10000);
SerialAT.println("AT+CSSLCFG=\"sslversion\",0,3"); //Configure SSL contect ssl_ctxindex,sslversion <0,TLS1.2>
Read_Response(10000);
SerialAT.println("AT+CSSLCFG=\"authmode\",0,0"); //Establishing MQTT Connection <ssl_ctx_index,authmode<0,no autentification>
Read_Response(10000);
SerialAT.println("AT+CMQTTACCQ=0,\"Username\",0,4"); // Acquire a client <client_index,client_ID>
Read_Response(10000);
SerialAT.println("AT+CMQTTSSLCFG=0,0"); // Set the SSL context <session_id,ssl_ctx_index> ssl_ctx_index check AT+CSSLCFG command
Read_Response(10000);
SerialAT.println("AT+CMQTTCONNECT=0,\"tcp://mqtt3.thingspeak.com:1883\",90,1,\"Username\",\"password\""); //Connect to MQTT server <client_index,server_addr,keep_alive time,clean_session,username,password>
Read_Response_Ignore_OK(3000);
String payload="\"channels/"+ String(ChannelId)+"/publish\"";
int Payload_Length;
Payload_Length=payload.length();
SerialAT.println("AT+CMQTTTOPIC=0,"+String(Payload_Length)); // Input the publish message topic <client_index,req_length>
SerialAT.println(payload);
Read_Response_Ignore_OK(3000);
payload="field1=12&field2=13&status=MQTTPUBLISH";
Payload_Length=payload.length();
SerialAT.println("AT+CMQTTPAYLOAD=0,"+String(Payload_Length)); // input the publish message body <client_index,req_length>
SerialAT.println(payload);
Read_Response_Ignore_OK(1000);
SerialAT.println("AT+CMQTTPUB=0,0,60,0,0"); // Publish a message to the server <client_id,qos,pub_timeout,retained>
Read_Response_Ignore_OK(1000);
Serial.print(Receive_buffer);
Serial.println("And we are done");
I wanted to write to my public channel 2278931 with 8 different values to 8 different gauge widgets.
Here is my link.
https://api.thingspeak.com/update.json?api_key=xxxxxxxxxxxxxxxx&field1=1&field2=2&field3=3&field4=4&field5=5&field6=6&field7=7&field8=8
You can change values and in the link to change gauge values. On edit I edited my write key to make it not work for others but it will work with your own key.
Up until a few weeks ago, there was a "channels shared with me" option in Thingspeak. I was able to access the channel created by a different user, only once. The next time me and my groupmate tried to open the channel, there wasn't a "channels shared with me" option anymore. Why is that and how can this be resolved?
Is there any problem from thingspeak side, from last month my data is not uploading
Currently, I am trying to setup MATLAB and Simulink to connect with Unity. But I have some questions about the installation of ROS on my computer and ROS Toolbox. I found that there are several ROS installations, so, could you please kindly help and support? Hoping that your support will help a lot to my master's thesis.
i want make web site for pre registation to the vachile in thish project i can not thinke how to register in port and how to make .....????
i want make uniqe project
Hi! Actually I'm trying to store data from 5 sensors on the ThingSpeak cloud. I was able to do it 2-3 days back, but right now I'm trying to do the same for last 2-3 hours and it's just not happening. There's nothing wrong with the code because it's getting compiled properly. I'm using
ThingSpeak.writeFields(2261556,"xxxxxxxxxxxxxxxx");
I tried printing its value after storing in a temporary variable........The value comes out to be -301. Is there any fix for this? I need it urgently for a project.
I hope to receive some help soon. Thanks!
% Sample data from channels
channel1Data = 2226948; % Your data for channel 1
% Threshold values for each alert level
threshold1 = 100;
threshold2 = 200;
threshold3 = 300;
% Initialize alert level to 0 (no alert)
alertLevel = 0;
% Check thresholds and determine alert level
if channel1Data >= threshold1 && channel1Data <= threshold2
alertLevel = 1; % Yellow Alert
elseif channel1Data >= threshold2 && channel1Data <= threshold3
alertLevel = 2; % Orange Alert
elseif channel1Data >= threshold3
alertLevel = 3; % Red Alert
end
% Define alert message based on alert level
if alertLevel == 1
alertMessage = 'Threshold exceeded for channel 1!';
elseif alertLevel == 2
alertMessage = 'Threshold exceeded for channel 2!';
elseif alertLevel == 3
alertMessage = 'Threshold exceeded for channel 3!';
else
alertMessage = 'No alert for channel 1.';
end
% Call SMS integration function with the alert message
sendMessage('+639319217695', alertMessage);
function sendMessage(number, message)
% Replace with your SMS service API endpoint and API key
apiUrl = 'https://api.semaphore.co/api/v4/messages';
apiKey = '-----';
% Compose the message payload
payload = struct('apikey', apiKey, 'number', number, 'message', message);
try
% Send the SMS using the SMS service API
response = webwrite(apiUrl, payload);
% Process the response as needed
disp('SMS sent successfully');
catch
disp('Error sending SMS');
end
end
I've just bought a rain gauge with esp 32 but the problem is Its code is already programmed on esphome
Now I need to send the data to one of my channels so I can perform the logic for my sms API
Tell me if it's possible
Hi
We are using Raspberry Pi to send some sensor data to Thingspeak. Is it possible to send this data to any other IoT hub service lets say Thingsboard, AWS or Azure IoT hub? Does Thingspeak provide any kind of API which can give us alerts whenever the data is received in Thingspeak server ?
Thanks
I was unable to update fields during this time and was also unable to login to thingspeak.com.
Hi, is the timecontrol in matlab stop running around 1500 UTC+8 230809?
Hi I'm a newbie, the data I'm sending from the weather station I'm trying hasn't reached me for about 1 week.
Or rather, the data is sent regularly from the station to Thingspeak which connects and sends, but looking on the site it seems that they are not received.
The latest data received, in fact, dates back to 7 days ago.
By chance, after sending the 8000 available data, does the service stop?
Hi
I am a beginner in MATLAB. I am trying to stimulate RF energy harvesting. Is it possble to stimulate this using simulink? Kindly help me. Thank You.
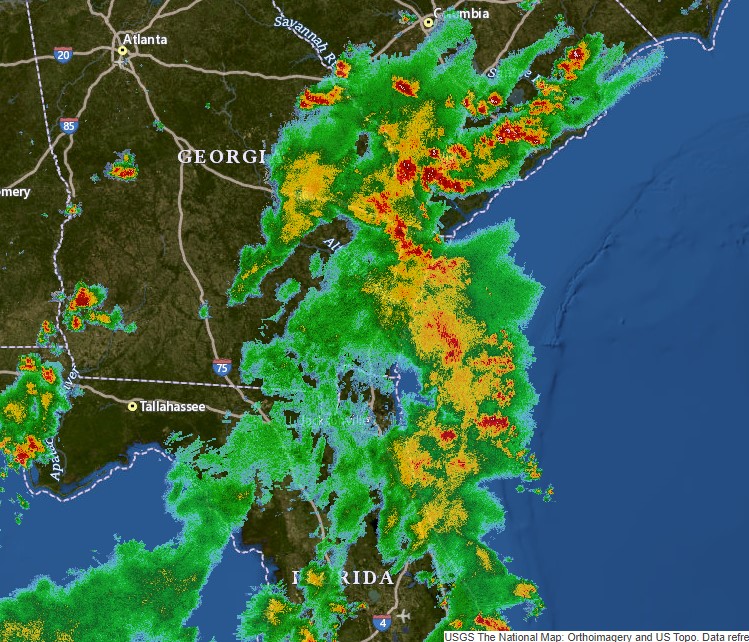
im trying to draw a path for the aircraft. so the aircraft needs to avoid all the red zones in the radar image i have and should travel only on green zones even the waypoints are on redzones.
% Load the radar image
radar_image = imread('radar.jpg');
I = radar_image;
% Display the radar image
figure;
imshow(I);
% Select waypoints
disp('Select the waypoints:');
[x, y] = ginput;
waypoints = [x, y];
% Save waypoints
save('waypoints.mat', 'waypoints');
% Load saved waypoints
load('waypoints.mat');
% Plot waypoints and connect them with lines
hold on;
plot(waypoints(:, 1), waypoints(:, 2), 'ro', 'LineWidth', 2);
plot(waypoints(:, 1), waypoints(:, 2), 'r--', 'LineWidth', 1);
% Load aircraft icon image
aircraft_icon = imread('aircraft_icon.png');
% Resize the aircraft icon image
desired_size = 30; % Change this value to adjust the size of the aircraft icon
aircraft_icon_resized = imresize(aircraft_icon, [desired_size, desired_size]);
% Animate aircraft using AI algorithm
tolerance = 5; % Tolerance for reaching waypoints
max_steps = 100; % Maximum steps to reach the destination
step_size = 1; % Step size for potential field calculations
% Plot the initial position of the aircraft
current_pos = waypoints(1, :);
h = image(current_pos(1), current_pos(2), aircraft_icon_resized);
set(h, 'AlphaData', 0.7); % Set the transparency (optional)
for i = 1:size(waypoints, 1)-1
start = waypoints(i, :);
finish = waypoints(i+1, :);
% Perform A* algorithm to find an alternate path through green zones
alternate_path = A_star(start, finish);
for j = 1:size(alternate_path, 1)-1
% Initialize the position of the aircraft
current_pos = alternate_path(j, :);
next_waypoint = alternate_path(j+1, :);
% Continue to the next waypoint if the current position is already near the waypoint
if norm(current_pos - next_waypoint) <= tolerance
continue;
end
% Perform animation to move the aircraft through the potential field
animateAircraft(current_pos, next_waypoint, max_steps, step_size, h);
% Update the radar image I with the current position of the aircraft
I(round(current_pos(2)), round(current_pos(1))) = 0;
end
end
function animateAircraft(current_pos, next_waypoint, max_steps, step_size, h)
% Animate the aircraft to move from current_pos to next_waypoint
for t = 1:max_steps
% Check if the aircraft has reached the destination waypoint
if norm(current_pos - next_waypoint) <= tolerance
break;
end
% Calculate potential field forces
attractive_force = next_waypoint - current_pos;
repulsive_force = zeros(1, 2);
% Calculate the repulsive forces from each red and yellow region
red_regions = find(I == 1);
yellow_regions = find(I == 2);
for k = 1:length(red_regions)
[r, c] = ind2sub(size(I), red_regions(k));
obstacle = [c, r];
repulsive_force = repulsive_force + calculate_repulsive_force(current_pos, obstacle);
end
for k = 1:length(yellow_regions)
[r, c] = ind2sub(size(I), yellow_regions(k));
obstacle = [c, r];
repulsive_force = repulsive_force + calculate_repulsive_force(current_pos, obstacle);
end
% Combine the forces to get the total force
total_force = attractive_force + 0.5 * repulsive_force; % Reduce repulsive force to move through obstacles more easily
% Normalize the total force and move the aircraft
total_force = total_force / norm(total_force);
current_pos = current_pos + step_size * total_force;
% Update the aircraft position on the plot
set(h, 'XData', current_pos(1), 'YData', current_pos(2));
drawnow; % Force the plot to update
% Pause for a short duration to visualize the animation
pause(0.05);
end
end
function force = calculate_repulsive_force(position, obstacle, I)
% Constants for the potential field calculation
repulsive_gain = 1000; % Adjust this value to control the obstacle avoidance strength
min_distance = 5; % Minimum distance to avoid division by zero
% Calculate the distance and direction to the obstacle
distance = norm(position - obstacle);
direction = (position - obstacle) / distance;
% Check if the obstacle is a waypoint
is_waypoint = false;
waypoints = [1, 2; 3, 4; 5, 6]; % Replace this with the actual waypoints' coordinates
for i = 1:size(waypoints, 1)
if isequal(obstacle, waypoints(i, :))
is_waypoint = true;
break;
end
end
% Check the color of the obstacle in the radar image
color = I(round(obstacle(2)), round(obstacle(1)));
% Calculate the repulsive force
if ~is_waypoint && color ~= 0 % Obstacle is not a waypoint or 0
force = repulsive_gain / max(distance, min_distance)^2 * direction;
else
force = zeros(1, 2);
end
end
this the code im using. But according to the output im getting, the aircraft is still travelling through all the red and yellow zones.i have tagged the aircraft_icon.png and rada.jpg images which have been used in the code. can somebody help me out with this?