Results for
The study of nonlinear dynamical systems in lattices is an area of research with continuously growing interest.The first systematic studies of these systems emerged in the late 1930 s,thanks to the work of Frenkel and Kontorova on crystal dislocations.These studies led to the formulation of the discrete Klein-Gordon equation (DKG).Specifically,in 1939,Frenkel and Kontorova proposed a model that describes the structure and dynamics of a crystal lattice in a dislocation core.The FK model has become one of the fundamental models in physics,as it has been proven to reliably describe significant phenomena observed in discrete media.The equation we will examine is a variation of the following form:

The process described involves approximating a nonlinear differential equation through the Taylor method and simplifying it into a linear model.Let's analyze step by step the process from the initial equation to its final form.For small angles, can be approximated through the Taylor series as:
can be approximated through the Taylor series as:
We substitute  in the original equation with the Taylor approximation:
in the original equation with the Taylor approximation:
To map this equation to a linear model,we consider the angles  to correspond to displacements
to correspond to displacements  in a mass-spring system.Thus,the equation transforms into:
in a mass-spring system.Thus,the equation transforms into:
to correspond to displacements We recognize that the term  expresses the nonlinearity of the system,while β is a coefficient corresponding to this nonlinearity,simplifying the expression.The final form of the equation is:
expresses the nonlinearity of the system,while β is a coefficient corresponding to this nonlinearity,simplifying the expression.The final form of the equation is:
The exact value of β depends on the mapping of coefficients in the Taylor approximation and its application to the specific physical problem.Our main goal is to derive results regarding stability and convergence in nonlinear lattices under nonlinear conditions.We will examine the basic characteristics of the discrete Klein-Gordon equation:

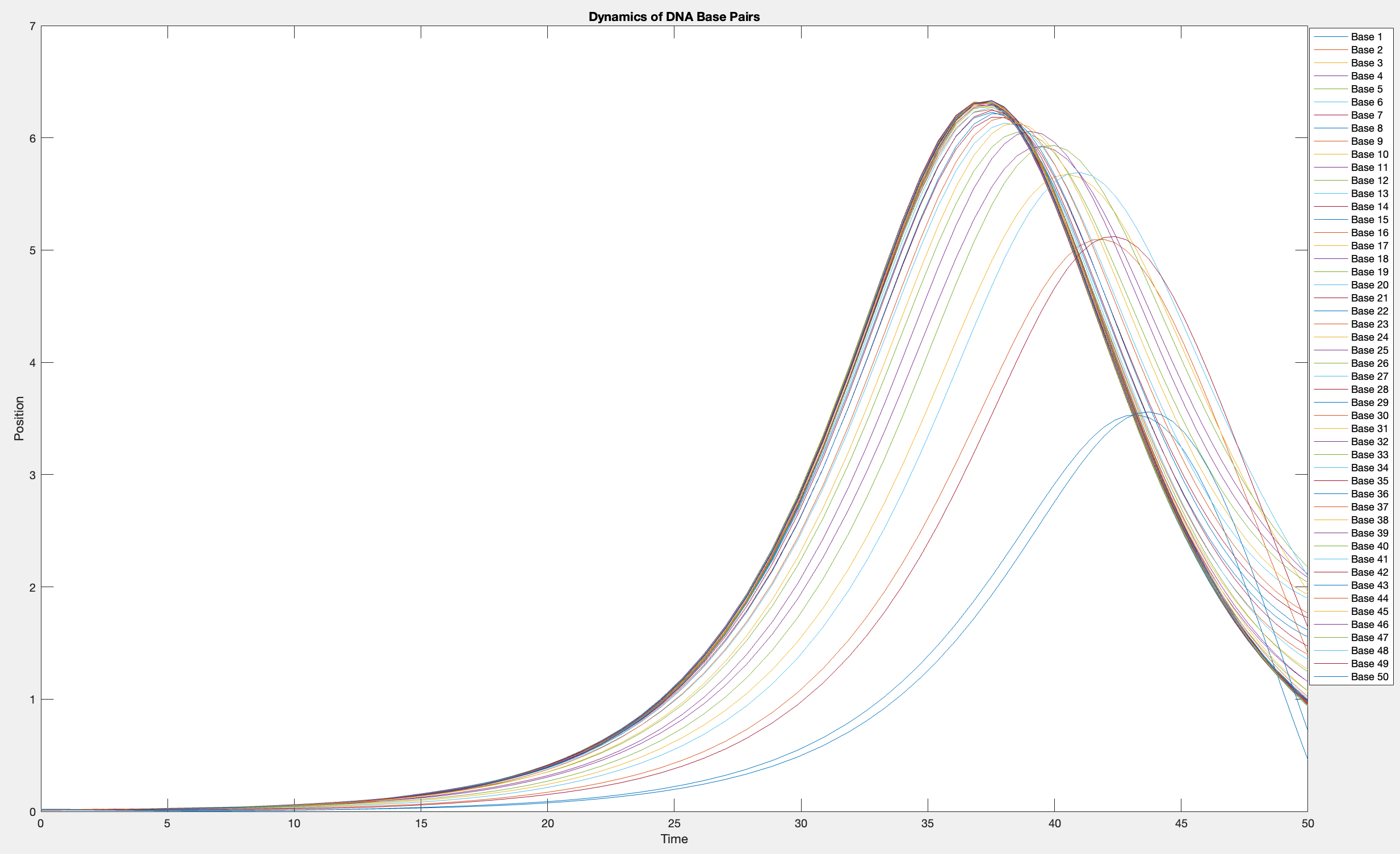
This model is often used to describe the opening of the DNA double helix during processes such as transcription.The model focuses on the transverse motion of the base pairs,which can be represented by a set of coupled nonlinear differential equations.
% Parameters
numBases = 50; % Number of base pairs
kappa = 0.1; % Elasticity constant
omegaD = 0.2; % Frequency term
beta = 0.05; % Nonlinearity coefficient
% Initial conditions
initialPositions = 0.01 + (0.02 - 0.01) * rand(numBases, 1);
initialVelocities = zeros(numBases, 1);
Time span
tSpan = [0 50];
>> % Differential equations
odeFunc = @(t, y) [y(numBases+1:end); ... % velocities
kappa * ([y(2); y(3:numBases); 0] - 2 * y(1:numBases) + [0; y(1:numBases-1)]) + ...
omegaD^2 * (y(1:numBases) - beta * y(1:numBases).^3)]; % accelerations
% Solve the system
[T, Y] = ode45(odeFunc, tSpan, [initialPositions; initialVelocities]);
% Visualization
plot(T, Y(:, 1:numBases))
legend(arrayfun(@(n) sprintf('Base %d', n), 1:numBases, 'UniformOutput', false))
xlabel('Time')
ylabel('Position')
title('Dynamics of DNA Base Pairs')
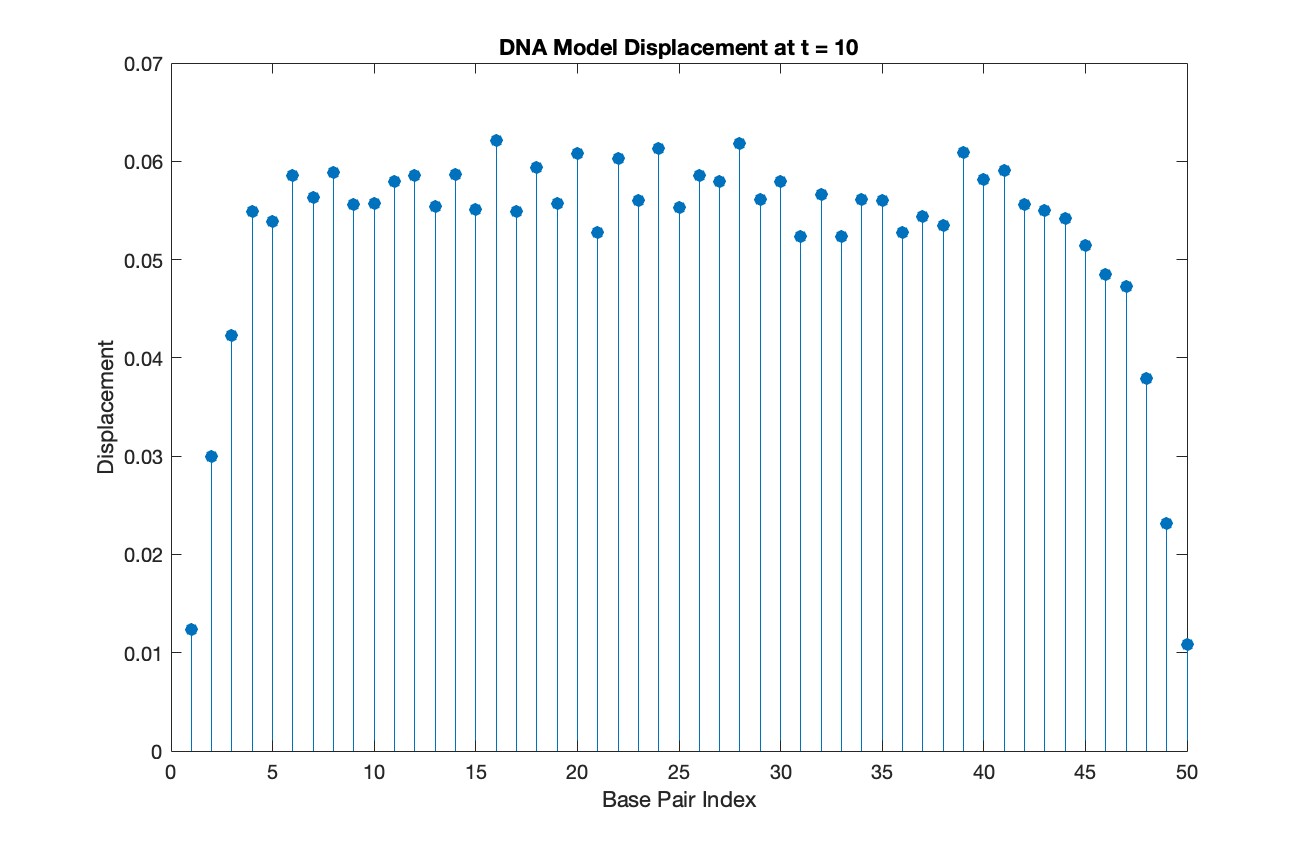
% Choose a specific time for the snapshot
snapshotTime = 10;
% Find the index in T that is closest to the snapshot time
[~, snapshotIndex] = min(abs(T - snapshotTime));
% Extract the solution at the snapshot time
snapshotSolution = Y(snapshotIndex, 1:numBases);
% Generate discrete plot for the DNA model at the snapshot time
figure;
stem(1:numBases, snapshotSolution, 'filled')
title(sprintf('DNA Model Displacement at t = %d', snapshotTime))
xlabel('Base Pair Index')
ylabel('Displacement')
% Time vector for detailed sampling
tDetailed = 0:0.5:50;
% Initialize an empty array to hold the data
data = [];
% Generate the data for 3D plotting
for i = 1:numBases
% Interpolate to get detailed solution data for each base pair
detailedSolution = interp1(T, Y(:, i), tDetailed);
% Concatenate the current base pair's data to the main data array
data = [data; repmat(i, length(tDetailed), 1), tDetailed', detailedSolution'];
end
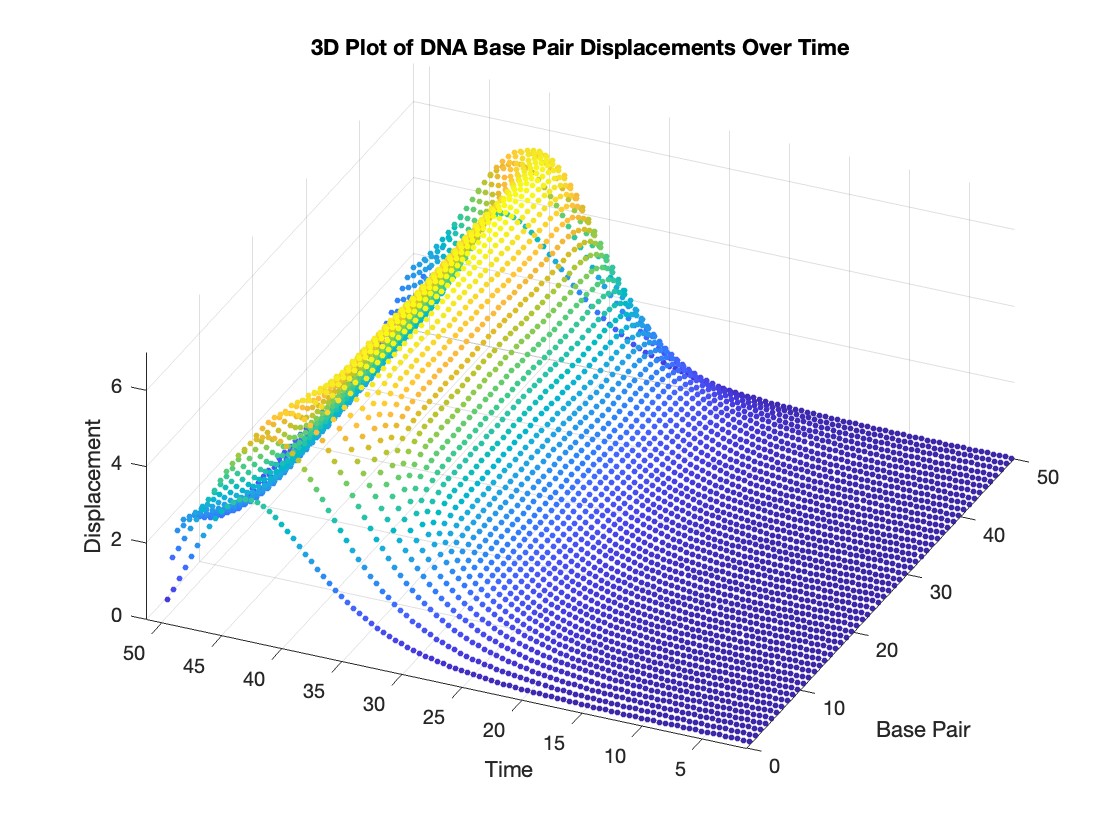
% 3D Plot
figure;
scatter3(data(:,1), data(:,2), data(:,3), 10, data(:,3), 'filled')
xlabel('Base Pair')
ylabel('Time')
zlabel('Displacement')
title('3D Plot of DNA Base Pair Displacements Over Time')
colormap('rainbow')
colorbar
Lots of students like me have a break from school this week or next! If y'all are looking for something interesting to do learn a bit about using hgtransform by making the transforming snake animation in MATLAB!
Code below!
⬇️⬇️⬇️
numblock=24;
v = [ -1 -1 -1 ; 1 -1 -1 ; -1 1 -1 ; -1 1 1 ; -1 -1 1 ; 1 -1 1 ];
f = [ 1 2 3 nan; 5 6 4 nan; 1 2 6 5; 1 5 4 3; 3 4 6 2 ];
clr = hsv(numblock);
shapes = [ 1 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 1 % box
0 0 .5 -.5 .5 0 1 0 -.5 .5 -.5 0 1 0 .5 -.5 .5 0 1 0 -.5 .5 -.5 0 % fluer
0 0 1 1 0 .5 -.5 1 .5 .5 -.5 -.5 1 .5 .5 -.5 -.5 1 .5 .5 -.5 -.5 1 .5 % bowl
0 .5 -.5 -.5 .5 -.5 .5 .5 -.5 .5 -.5 -.5 .5 -.5 .5 .5 -.5 .5 -.5 -.5 .5 -.5 .5 .5]; % ball
% Build the assembly
set(gcf,'color','black');
daspect(newplot,[1 1 1]);
xform=@(R)makehgtform('axisrotate',[0 1 0],R,'zrotate',pi/2,'yrotate',pi,'translate',[2 0 0]);
P=hgtransform('Parent',gca,'Matrix',makehgtform('xrotate',pi*.5,'zrotate',pi*-.8));
for i = 1:numblock
P = hgtransform('Parent',P,'Matrix',xform(shapes(end,i)*pi));
patch('Parent',P, 'Vertices', v, 'Faces', f, 'FaceColor',clr(i,:),'EdgeColor','none');
patch('Parent',P, 'Vertices', v*.75, 'Faces', f(end,:), 'FaceColor','none',...
'EdgeColor','w','LineWidth',2);
end
view([10 60]);
axis tight vis3d off
camlight
% Setup vectors for animation
h=findobj(gca,'type','hgtransform')'; h=h(2:end);
r=shapes(end,:)*pi;
steps=100;
% Animate between different shapes
for si = 1:size(shapes,1)
sh = shapes(si,:)*pi;
diff = (sh-r)/steps;
% Animate to a new shape
for s=1:steps
arrayfun(@(tx)set(h(tx),'Matrix',xform(r(tx)+diff(tx)*s)),1:numblock);
view([s*360/steps 20]); drawnow();
end
r=sh;
for s=1:steps; view([s*360/steps 20]); drawnow(); end % finish rotate
end
This Arduino ino sketch utilizes the new Arduino R4 with LED matrix. I use a thermistor to measure temperature and send it to the led MAtrix for local display and also to ThingSpeak for cloud display at public
- Channel ID: 2300884
Note: I used Christopher's suggestion (elsewhere) to start with the Arduino R4 wifi example in the example folder of the Arduino IDE. That made all the difference in the world! Plus, I had serious issues with "write" data until I watched this YouTube video.
I have a development that requires 12 fields, but ThingSpeak only offers 8. Without further subscription, can I combine 2 Channels ?
I've read thru the API refernce doc and the information in the right-hand side panel on "API Keys" tab and so I 'm pretty sure the answer is "no" but throught it was worth double-checking.
My application for this is that I have several devices, each with their own channel. For security, I'd like them to be able to deduce or calculate the write API key to their channel based on their device serial number (which each device knows) so that I don't have to store the API key in their firmware.
thanks...
Hello everyone,
I am currently working on a project to simulate an autonomous energy production plant integrating renewable sources and a hydroelectric generator using MATLAB.
If anyone has experience in this area or can provide advice I would be extremely grateful. Thank you in advance for your precious help !
Hello, I am using an Arduino UNO R3 with an ESP8266 WiFi Shield to connect 2 DHT-11 sensors to upload their data to ThingSpeak. Sometimes ThingSpeak would only post data on a certain sensor for a bit and then upload to the other randomly. I want ThingSpeak to pick up the sensors within 30-40 seconds of each other consistently. I believe there might be something wrong with my code. I was hoping to get some help on it. Anything is appreciated.
Below is provided code
SoftwareSerial esp8266(RX,TX);
void setup() {
Serial.begin(9600);
esp8266.begin(38400);
sendCommand("AT",5,"OK");
sendCommand("AT+CWMODE=1",5,"OK");
sendCommand("AT+CWJAP=\""+ AP +"\",\""+ PASS +"\"",20,"OK");
}
void loop() {
String getData = "GET /update?api_key="+ API +"&field1="+getTemperatureValue()+"&field2="+getHumidityValue();
sendCommand("AT+CIPMUX=1",5,"OK");
sendCommand("AT+CIPSTART=0,\"TCP\",\""+ HOST +"\","+ PORT,15,"OK");
sendCommand("AT+CIPSEND=0," +String(getData.length()+4),4,">");
esp8266.println(getData);delay(6000);countTrueCommand++;
String getData2 = "GET /update?api_key="+ API +"&field3="+getTemperatureValue2()+"&field4="+getHumidityValue2();
sendCommand("AT+CIPMUX=1",5,"OK");
sendCommand("AT+CIPSTART=0,\"TCP\",\""+ HOST +"\","+ PORT,15,"OK");
sendCommand("AT+CIPSEND=0," +String(getData2.length()+4),4,">");
esp8266.println(getData2);delay(6000);countTrueCommand++;
sendCommand("AT+CIPCLOSE=0",5,"OK");
}
String getTemperatureValue(){
dhtObject.read(dht_apin);
Serial.print(" Temperature(C)= ");
int temp = dhtObject.temperature;
Serial.println(temp);
delay(50);
return String(temp);
}
String getHumidityValue(){
dhtObject.read(dht_apin);
Serial.print(" Humidity in %= ");
int humidity = dhtObject.humidity;
Serial.println(humidity);
delay(50);
return String(humidity);
}
String getTemperatureValue2(){
dhtObject2.read(dht_bpin);
Serial.print(" Temperature(C)= ");
int temp2 = dhtObject2.temperature;
Serial.println(temp2);
delay(50);
return String(temp2);
}
String getHumidityValue2(){
dhtObject2.read(dht_bpin);
Serial.print(" Humidity in %= ");
int humidity2 = dhtObject2.humidity;
Serial.println(humidity2);
delay(50);
return String(humidity2);
}
void sendCommand(String command, int maxTime, char readReplay[]) {
Serial.print(countTrueCommand);
Serial.print(". at command => ");
Serial.print(command);
Serial.print(" ");
while(countTimeCommand < (maxTime*1))
{
esp8266.println(command);//at+cipsend
if(esp8266.find(readReplay))//ok
{
found = true;
break;
}
countTimeCommand++;
}
if(found == true)
{
Serial.println("Pass");
countTrueCommand++;
countTimeCommand = 0;
}
if(found == false)
{
Serial.println("Fail");
countTrueCommand = 0;
countTimeCommand = 0;
}
found = false;
}
Due to temporary problem MathWorks account was unable to login. Kindly resolve this issue.
how to generate CA signed certificate for mqtt
I asked my question in the general forum and a few minutes later it was deleted. Perhaps this is a better place?
Rather than using my German regional forum (as I do not speak German), I want to ask questions in an international English-speaking forum. Presumably there should be an international English forum for everyone around the world, as English is the first or second language of everyone who has gone to school. Where is it?
When I embed Matlab windows into C#, I use C# to call the mouse functions such as drawline() and getpts() which are encapsulated in Matlab's dll, and then the program crashes, how can I solve this problem?
ps : The functions that I call in C# can be executed in Matlab.
ps : If I don't embed the window into C#, but just let C# call the Matlab function, it can execute the mouse control normally in the window, but once embedded into the C# window, it will crash when execute the mouse command.
I have a channel updating every 10 minutes. The last 8000 entries therefore go back to late December (around 55 days). I want to extend the range of data downloaded by setting a timescale between results, so say if I request a timescale of 20 minutes should I not be able to get data from twice as long ago? e.g.
https://api.thingspeak.com/channels/xxxxxx/fields/1.json?api_key=XXXXXXXXXXX×cale=20&start=2022-12-30%2022:00:00
No matter what timescale or averaging I use, the last 8000 entries are the only ones processed for the downloaded data, so I just get fewer results. Unless I use a timescale of 1440; then I can download results from the very first entry in 2022. A timescale of 720 or lower however will only go back 55 days.
So I see the desired result when I use a timescale of 1440, but no other timescale will work. Is this a bug?
New to ThingsSpeak. I have a Photon 2 and vreated a webhook with simple code to send random numbers reprsented as 'temp' to a channel in ThingSpeak. All good with the code and my device shows the webhook is sending data and the events corespond to the same number of entries received in my channel. However, I do not see any visual graph of the data. What am i missing?
Hi Everyone. I am facing a problem while connecting the FMU to the buses. I have one FMU which expects 9 inputs and I did clarify the same while using bus creator. But in the end i am getting this error which i am trying to solve for couple of hours but didn't get any solution. So if any knows about the same please help me. I would give details as well if you need any other information. 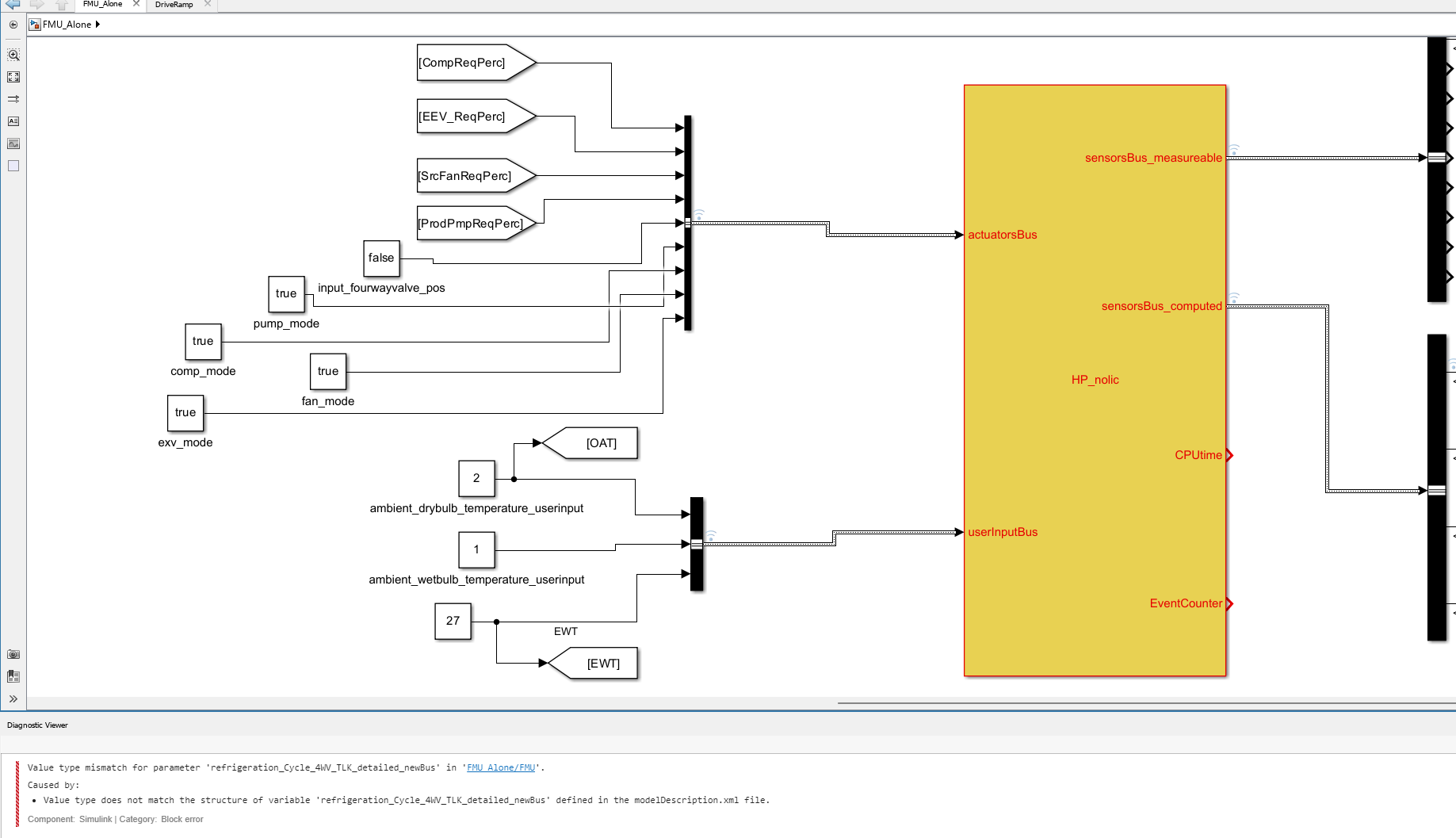
Hello Im tring to connect my master node to thingspeak but it gives error like:
Data received from slave - Temperature: 25.90, Humidity: 46.00, Soil Moisture: 0, pH: 4.26
Failed to send data to ThingSpeak, status code: -301
Data received from slave - Temperature: 25.90, Humidity: 46.00, Soil Moisture: 0, pH: 4.26
Failed to send data to ThingSpeak, status code: -301
What should I do?
And what do you do for Valentine's Day?
I need to copy Channel field data from a specific data range (e.g. January 2024) from field 6 of channel A(see sample attached) to field 1 of channel B.
I have tried to adopt the Template "Get data from private channel" in the Matlab analysis area of Thingspeak. The last data can be copied according the sample, but I cannot manage to copy the complete datarange. My channel field contains half empty data in field 6, because I have posted data asynchrously from 2 devices to 1 channel up to now.
Any advice for proper Matlab code sample or the like is welcome!
I found read API key but there is no option for the read channel id
which technical support should I contact/ask for the published Simscape example?
Happy year of the dragon.