Results for
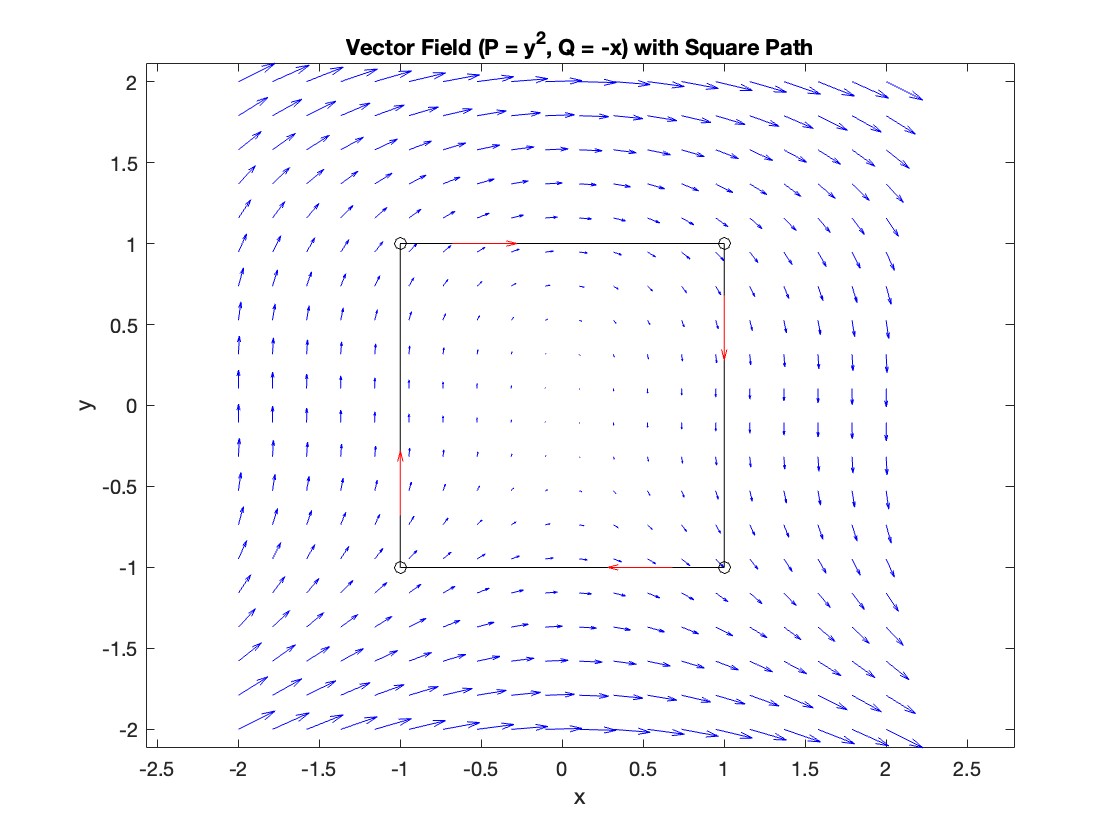
 , where C is the boundary of the square
, where C is the boundary of the square 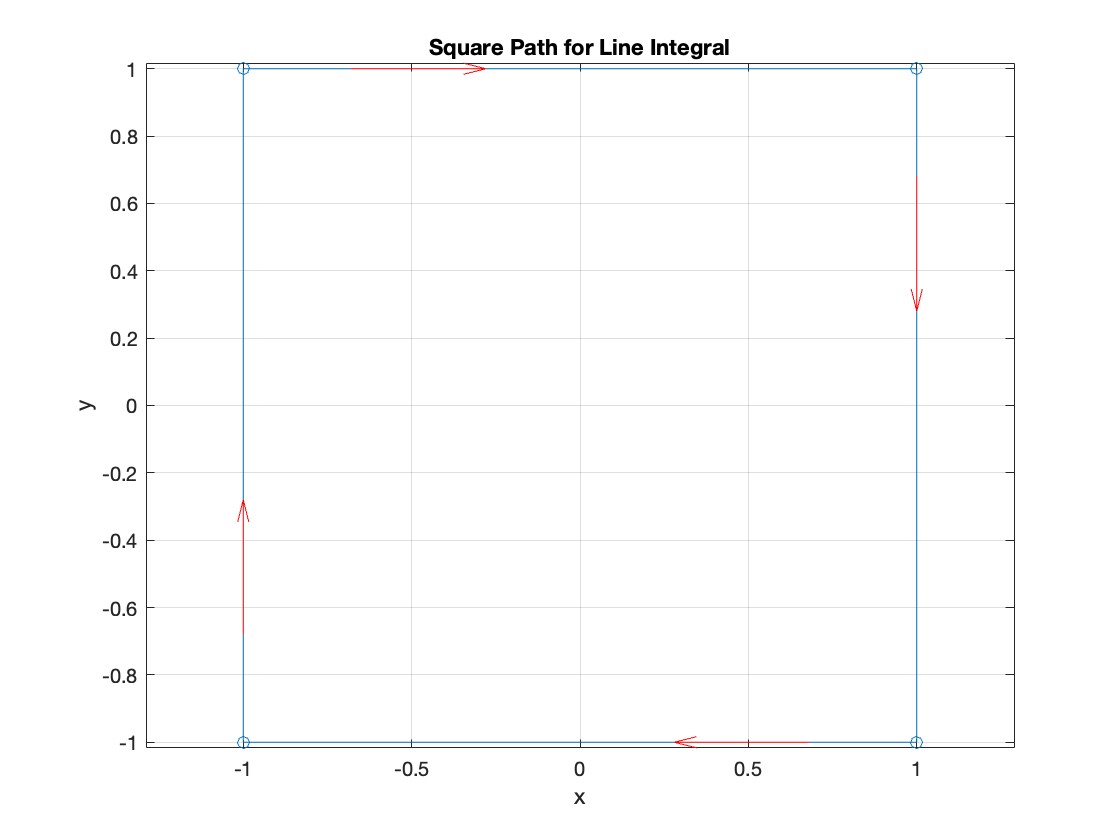
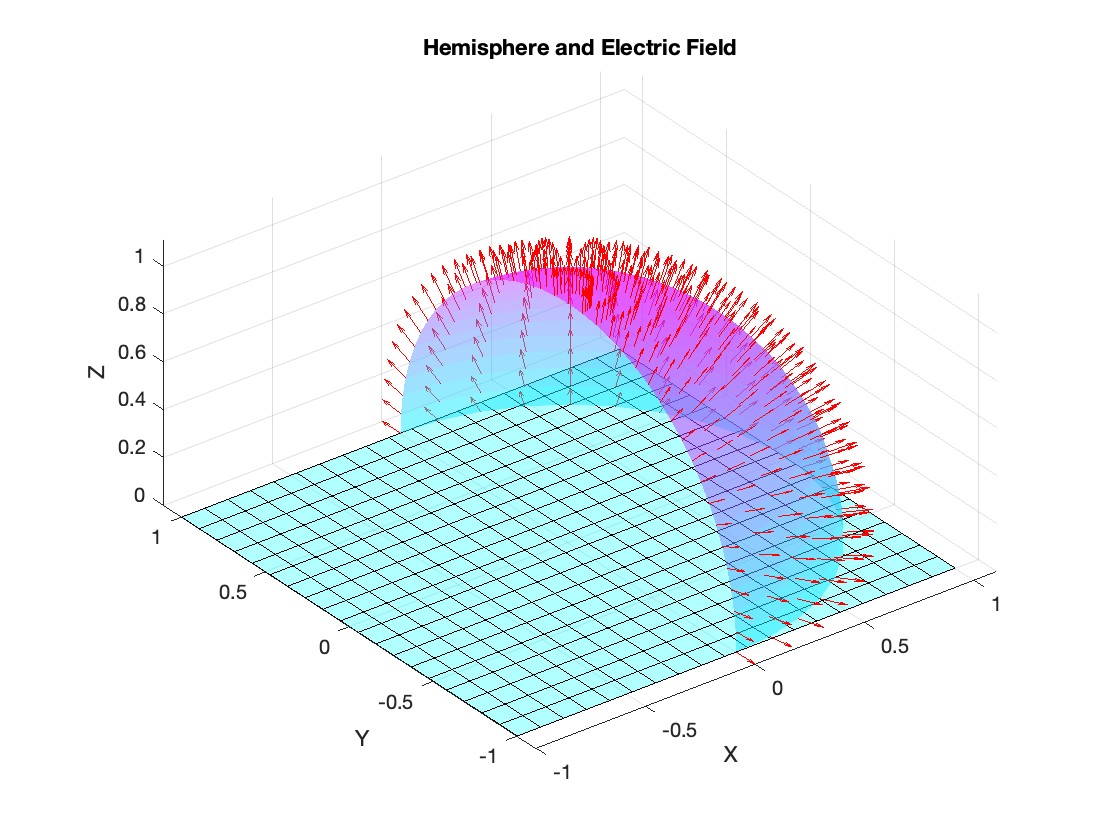
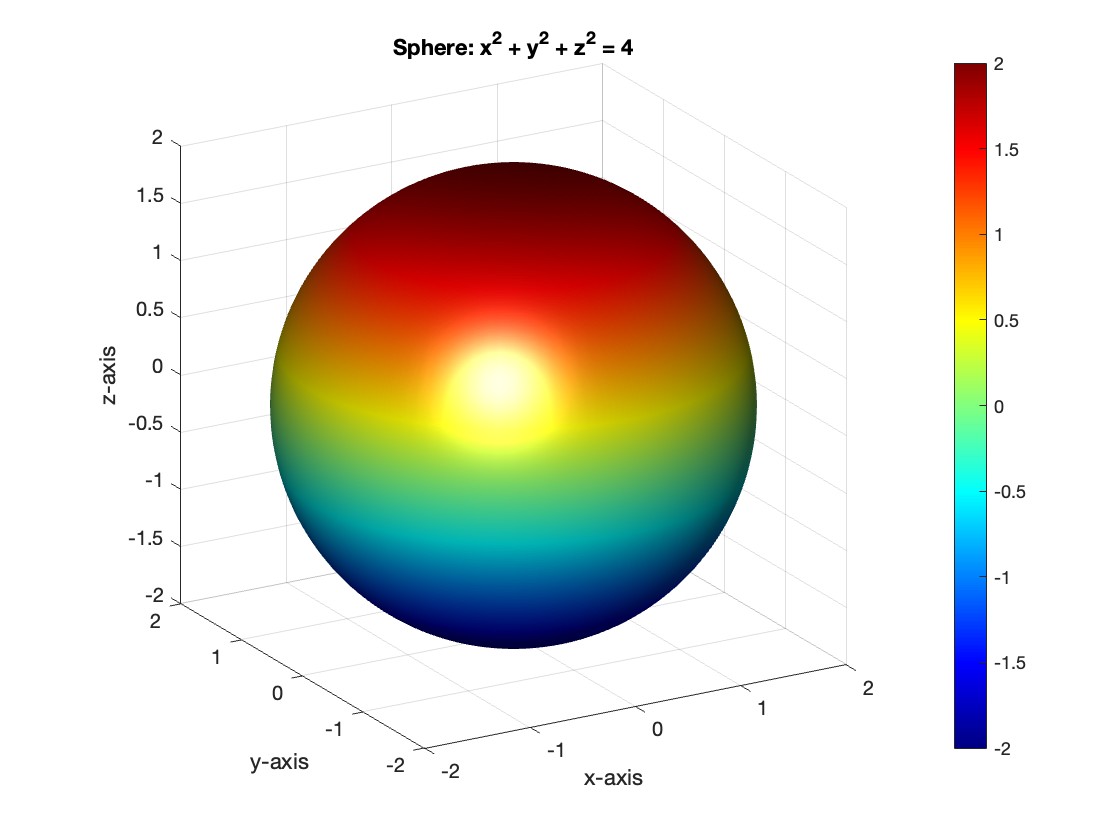
 over the sphere
over the sphere - Use Symbolic Variables and Functions: Define your variables symbolically, including the parameters of your spherical coordinates θ and ϕ and the radius r . This allows MATLAB to handle the expressions symbolically, making it easier to manipulate and integrate them.
- Express in Spherical Coordinates Directly: Since you already know the sphere's equation and the relationship in spherical coordinates, define x, y, and z in terms of r , θ and ϕ directly.
- Perform Symbolic Integration: Use MATLAB's `int` function to integrate symbolically. Since the sphere and the function
 are symmetric, you can exploit these symmetries to simplify the calculation.
are symmetric, you can exploit these symmetries to simplify the calculation.

- The speed stabilizes around 62 rad/sec after some initial oscillations, but when I try to run the same model using PMSM field oriented control block set, the speed is negative (negative rotation) and it keeps on increasing eventhough the speed reference provided is only upto 60. The waveform of both speed and torque has been attached hereby.
- Moreover, is there anyway to tune the PI controllers (inner and outer loops) of PMSM Field oriented blockset automatically.
- It can be seen from the torque waveform, there is soemkind of disturbance around 0.4-0.45 sec, which creates too much noise in current, torque waveforms. What could be the reason behind this.
Englisch Translate Französisch Deutsch Deutsch Russisch PONS Deepl übersetzer Spanisch Deutsch DeepL kostenlos Deutsch Englisch hallo, ich bitte um Hilfe! Seit Jahren habe ich Konto auf Thingspeak, den ich für meinen Zweck nicht richtig nutzen kann. Ich kann "Upoad to meine private Chanel", aber das lesen funktioniert nicht, weder in ArdunioIDE, noch Ardunio iot kann ich die gesendete Daten (Temperatur) von einem anderen Board lesen, es ist egal, ob ESP8266, ESP32, MKR, oder UnoWifi Rev2. Nichts! Die Beispiele im Bibliotek sind eine Katastrophe, "wetter-chanel" und diese funktionieren auch nicht. Auch nicht die von GitHub. Es sollte aber einfach sein, denn auf meiner Seite sehe ich ja "GET"+ url. inkl json+result.
Wo gibt es eine richtige sketch für "read private chanel/field" , welche funktioniert? Man braucht nicht die Wifi-Enstellungen, sondern den code für die Abfrage, "Serial.print"(value)"
Bitte um Hilfe, danke schön.
hello, I ask for help! I've had an account on Thingspeak for years, but I can't use it properly for my purpose. I can "Upoad to my private Chanel", but reading doesn't work, neither in ArdunioIDE nor Ardunio iot can I read the sent data (temperature) from another board, it doesn't matter whether ESP8266, ESP32, MKR, or UnoWifi Rev2. Nothing! The examples in the library are a disaster, "weather-chanel" and they don't work either. Not even the one from GitHub. But it should be easy, because on my site I see “GET”+ url. including json+result.
Where is there a proper sketch for "read private chanel/field" that works? You don't need the WiFi settings, but the code for the query, "Serial.print"(value)"
Please help, thank you very much.
- I'm trying to upload to the server every 3 seconds (which seemed to be providing the best results so far). Since the channel only accepts data transmit every 15 seconds, what is the optimized upload interval rate to match the interval rate of the channel? Because otherwise I have realized that my interval rate can go up to 1min sometimes for some reason.
- Is reading from/writing to the channel through simulink while the system is uploading data to the channel slow down th whole process? What is your overall suggestion in this case?

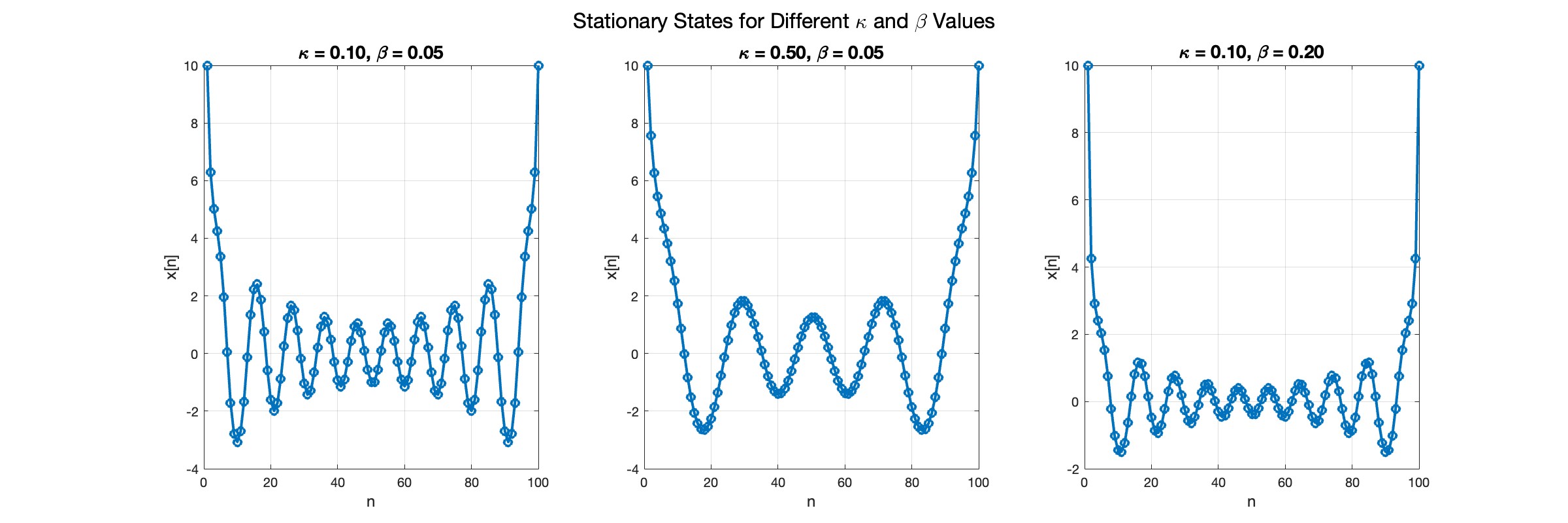
 , is zero, meaning the motion of the system does not change over time. This leads to a static differential equation:
, is zero, meaning the motion of the system does not change over time. This leads to a static differential equation: