Lead, lag, and PID compensator structures using bode plots
From the series: Using Bode Plots
Learn frequency domain characteristics of lead, lag, and PID controllers in this MATLAB® Tech Talk by Carlos Osorio.
Published: 29 Apr 2013
Before we proceed to an actual control design application example where we can use some of the concepts we have just been discussing, I want to spend a couple of minutes describing some of the primary characteristics of the most typically used compensator structures. The first structure I want to look at is the lead compensator. This controller consists of a single zero and a single pole. In order for this structure to behave as a lead compensator, the zero has to be located before the pole.
In this example, we have a zero at 10 radians per second and a pole at 100 radians per second. As we should expect, the magnitude trace breaks up with +20 dB per decade at the 0 and then goes flat as soon as it reaches the pole. Similarly, the phase starts climbing towards +90 degrees at the zero, and then it is brought down back to 0 by the pole.
This positive bump on the phase will have an additive effect on our open-loop transfer function, hence the name "lead compensator." By the way, note that the compensatory in this example has a DC gain of -20 dB. Just think of the s+10 as equivalent to 10(0.1s+1), and (s+100) as 100(0.01s+1). So, the DC gain of this transfer function will be 10/100, which is 0.1, which is -20 dB.
The second structure I want to mention is what is called a lag compensator. Note that this controller has the same structure as the lead, only, in this case, the pole is located before the zero. And as expected, the behavior is reversed.
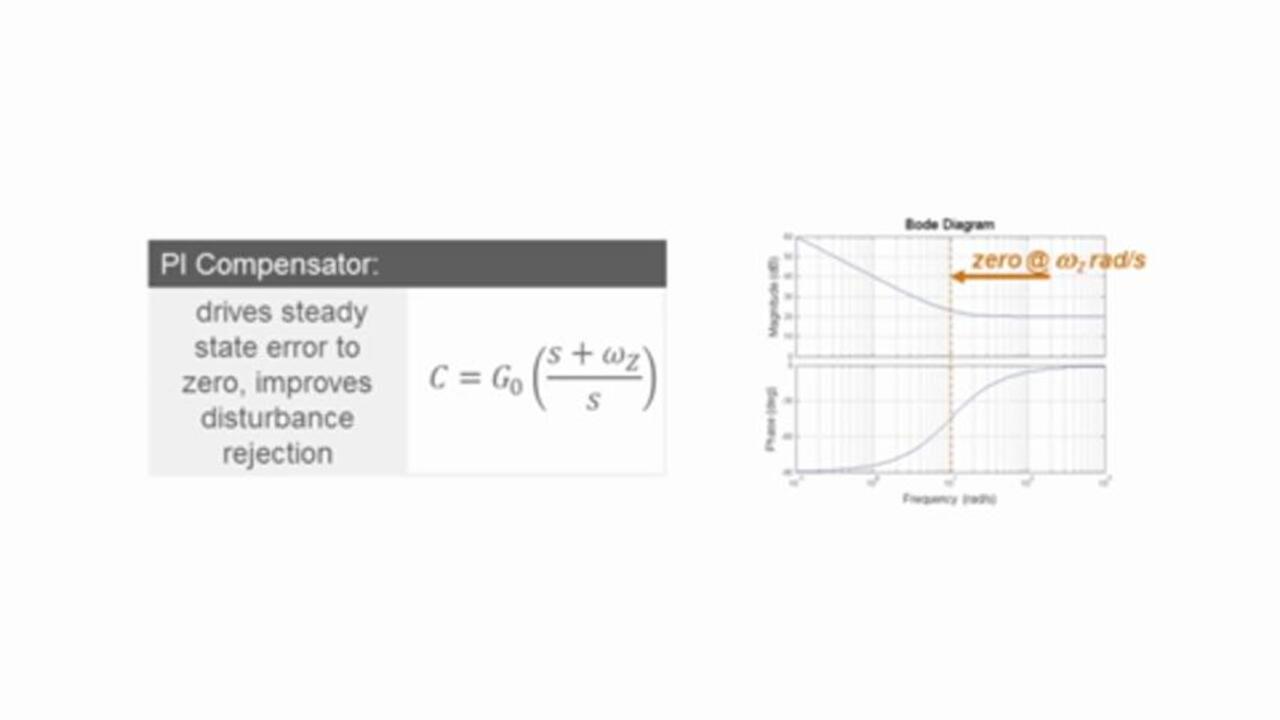
The third structure I want to look at is the PI controller. This is probably one of the most commonly-used compensator structures. It consists of a proportional gain plus an integral gain passing through a pure integrator.
Note that the frequency trace is not the superposition of these two. A sum on the logarithmic scale cannot be separated. To look at the frequency response, we first need to combine the two terms into one single transfer function with a common denominator of s. And after factoring, we will end up with some overall DC gain quantity, which will be a function of the relationship between Kp and Ki, and then 0 on the numerator, which will also be a function of Kp and Ki.
In any case, you can see that the pure integrator characteristics-- infinite gain at DC, and high gain over the low-frequency range-- will ensure zero steady state tracking error and will provide good low-frequency disturbance rejection characteristics, both of which are usually pretty desirable.
Finally, let us look at another very commonly-used structure, the PD compensator. In this case, we have a proportional gain and a derivative gain passing through a pure differentiator. Notice that this will behave as a single 0, and that because of the effect of the derivative, the magnitude gain will go towards infinity at high frequencies.
As I mentioned in one of the previous sections, besides the fact that pure differentiators are not realizable in digital controllers, because to calculate a derivative, you need knowledge of the future. And as far as I know, time travel has not yet been achieved.
Anyways, my main point was that the infinite gain at high frequencies is not desirable behavior, because discontinuities or noise on our system will be greatly amplified. So, in practice, you will always use what is called a filter differentiator. In essence, a filter differentiator is a pure differentiator and a pole placed at a frequency where we don't want to be differentiating anymore.
Once again, as the PI controller case, to find the frequency response we cannot just use superposition because of that sum. So, after taking common denominator, s+N in this case, and factoring in the Kp and Kd stuff, you can see that this structure-- a PD controller with a filter derivative-- is essentially the same as a lead compensator.
So, we get the good benefits of that added phase margin at the bump, which also means added damping around the crossover. Once again, both of those characteristics are also pretty desirable. As you can probably guess, a full PID controller combines the benefits of both these structures. And that is one of the reasons why in practice, PIDs are by far one of the most-used controller architectures in the industry.











Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)