comm.IntegrateAndDumpFilter
Integrate discrete-time signal with periodic resets
Description
The comm.IntegrateAndDumpFilter
System object™ creates a cumulative sum of the discrete-time input signal, while resetting the
sum to zero according to a fixed schedule. When the simulation begins, the object discards the
number of samples specified in the Offset property. After the initial offset,
the object sums samples of the input signal along columns and resets the sum to zero every
N input samples, where N represents the value of the
IntegrationPeriod property. The
reset occurs after the object produces the output at that time step.
To integrate discrete-time signals with periodic resets:
Create the
comm.IntegrateAndDumpFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
intdump = comm.IntegrateAndDumpFilterintdump. This object
integrates over a number of samples in an integration period, and then resets at the end
of that period.
intdump = comm.IntegrateAndDumpFilter(period)IntegrationPeriod property to
period.
intdump = comm.IntegrateAndDumpFilter(___,Name=Value)comm.IntegrateAndDumpFilter(IntegrationPeriod=4) sets the integration
period to 4.
Properties
Usage
Syntax
Description
Y = intdump(X)X, where N is the IntegrationPeriod parameter
value.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
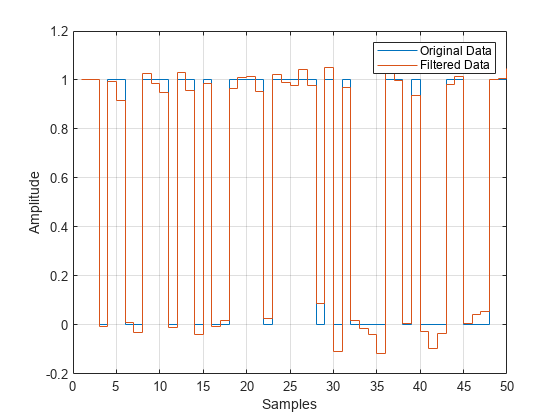
Create an integrate-and-dump filter having an integration period of 20 samples.
intdump = comm.IntegrateAndDumpFilter(20);
Generate BPSK-modulated binary data.
data = pskmod(randi([0 1],50,1),2,0);
Upsample the data and pass it through an additive white Gaussian noise channel.
unsampledData = upsample(data,20);
noisyData = awgn(unsampledData,25,"measured");Pass the noisy data through the filter.
filteredData = intdump(noisyData);
Plot the real component of the original and filtered modulated data. The integrate-and-dump filter removes most of the noise effects.
stairs([real(data) real(filteredData)]) legend("Original data","Filtered data") xlabel("Samples") ylabel("Amplitude") grid
More About
Extended Capabilities
Version History
Introduced in R2012a