Automated Driving Algorithms
Perception algorithms enable the vehicle to understand the static and dynamic elements in the environment. Perception software enables vehicles to use onboard sensor data to estimate the position and orientation of other vehicles. Perception software using simultaneous localization and mapping (SLAM) algorithms incrementally build a map and estimate the location of a vehicle at the same time. Automated Driving Toolbox™ provides perception software features related to these applications:
Detection and Tracking — Object and lane detection, camera sensor configuration, sensor fusion and tracking.
Localization and Mapping — Map building using SLAM algorithms and localization with prebuilt maps.
Geographic and HD Maps — Live map import from HERE and geographic map visualization.
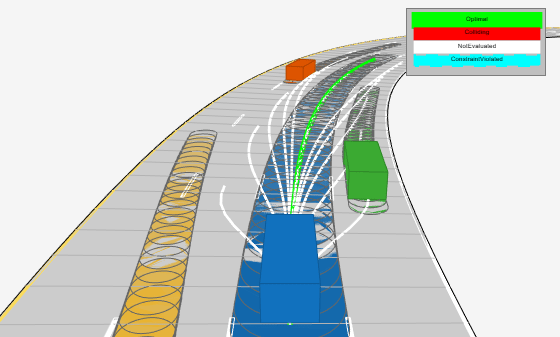
Planning algorithms use the output from the perception software to determine optimal path and actions that the vehicle must take in order to accurately respond to the changes in the environment. Control algorithms ensure that the vehicle executes the actions, and follows the path planned by the planning software with precision. Automated Driving Toolbox also provides software related to planning and vehicle control.
Highlighted Topics
- Calibrate a Monocular Camera
- Get Started with Lidar Lane Detection Using Deep Learning
- Multiple Object Tracking Tutorial
- Sensor Fusion Using Synthetic Radar and Vision Data
- Code Generation for Tracking and Sensor Fusion
- Performant and Deployable Monocular Visual SLAM
- Performant Monocular Visual-Inertial SLAM
- Lateral Control Tutorial
- Code Generation for Path Planning and Vehicle Control
Categories
- Detection and Tracking
Camera sensor configuration, object and lane detection, tracking and sensor fusion
- Localization and Mapping
Simultaneous localization and mapping, map building, odometry using vision and lidar data
- Planning and Control
Vehicle costmaps, optimal RRT* path planning, lateral and longitudinal controllers
- Geographic and HD Maps
HERE HD Live Map data import, streaming geographic map data display, coordinate conversion
Featured Examples

Create 360° Bird's-Eye-View Image Around a Vehicle
Create a 360° bird's-eye-view image around a vehicle for use in a surround view monitoring system. It then shows how to generate code for the same bird's-eye-view image creation algorithm and verify the results.

Lane Detection in Lidar Data Using Deep Learning
Detect lanes in lidar point clouds using LLDN-GFC deep learning network.

Train a Deep Learning Vehicle Detector
Train a vision-based vehicle detector using deep learning.

Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data from the Unreal Engine® simulation environment.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Develop a simultaneous localization and mapping algorithm using synthetic lidar sensor data recorded from the Unreal Engine simulation environment.

Extended Object Tracking of Highway Vehicles with Radar and Camera
Track objects whose dimensions span multiple sensor resolution cells.

Track-to-Track Fusion for Automotive Safety Applications
Fuse tracks from two vehicles to provide a more comprehensive estimate of the environment than seen by each vehicle.

Highway Lane Change Planner and Controller
Design and test the planner and controller components of a lane change maneuver system designed for highway driving.
Highway Trajectory Planning Using Frenet Reference Path
Plan a local trajectory in a highway driving scenario by using a reference path in Frenet coordinates and a dynamic list of obstacles.

Lidar Localization with Unreal Engine Simulation
Develop and evaluate a lidar localization algorithm using synthetic lidar data from the Unreal Engine simulation environment.

Visual Localization in a Parking Lot
Develop a visual localization system using synthetic image data from a parking lot scene in Unreal Engine environment.

Build Occupancy Map from 3-D Lidar Data Using SLAM
Build a 2-D Occupancy map from 3-D Lidar data using a simultaneous localization and mapping (SLAM) algorithm.

Create Occupancy Grid Using Monocular Camera and Semantic Segmentation
Estimate free space and create an occupancy grid using semantic segmentation and deep learning.
Object Tracking and Motion Planning Using Frenet Reference Path
Dynamically replan the motion of an autonomous vehicle based on the estimate of the surrounding environment. You use a Frenet reference path and a joint probabilistic data association (JPDA) tracker to estimate and predict the motion of other vehicles on the highway. Compared to the Highway Trajectory Planning Using Frenet Reference Path example, you use these estimated trajectories from the multi-object tracker in this example instead of ground truth for motion planning.

Truck Platooning Using Vehicle-to-Vehicle Communication
Simulate truck platooning application using V2V communication in Unreal Engine simulation environment.

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink®, with RoadRunner Scenario.