plotRangeDetection
Syntax
Description
plotRangeDetection(
displays object detections on a bird's-eye-plot from a list of ranges, azimuthal fields of
view, sensor mounting locations, and angles. rangeDetPlotter,ranges,fovs,locations,angles)plotRangeDetection
displays each object detection as an arc whose radius is the corresponding range value, with
arc length proportional to the azimuthal field of view of the sensor. The mounting locations
and angles of the sensor determine the center of the arc.
The range detection plotter, rangeDetPlotter, is associated with a
birdsEyePlot object and configures the display
of the specified detections.
To remove all detections associated with detection plotter
rangeDetPlotter, call the clearData
function and specify rangeDetPlotter as the input argument.
plotRangeDetection(
displays detections and their labels on a bird's-eye plot in addition to all input arguments
from the previous syntax.rangeDetPlotter,ranges,___,labels)
Examples
Use a simulated ultrasonic sensor to generate detections for multiple vehicles in a driving scenario.
Create Driving Scenario
Create a driving scenario containing a three-lane road using lane specifications.
scenario = drivingScenario; roadCenters = [-120 30 0;-60 0 0;0 0 0; 60 0 0; 120 30 0]; lspc = lanespec(3); road(scenario,roadCenters,Lanes=lspc);
Create an ego vehicle that travels in the center lane at a velocity of 30 m/s.
egovehicle = vehicle(scenario,ClassID=1); egopath = [1.5 0 0; 60 0 0; 111 25 0]; egospeed = 30; smoothTrajectory(egovehicle,egopath,egospeed);
Add a target vehicle that travels ahead of the ego vehicle at 30.5 m/s in the right lane, and changes lanes close to the ego vehicle.
ftargetcar = vehicle(scenario,ClassID=1); ftargetpath = [8 2; 60 -3.2; 120 33]; ftargetspeed = 30.5; smoothTrajectory(ftargetcar,ftargetpath,ftargetspeed);
Add a second target vehicle that travels in the left lane at 32m/s.
ltargetcar = vehicle(scenario,ClassID=1); ltargetpath = [-5.0 3.5 0; 60 3.5 0; 111 28.5 0]; ltargetspeed = 32; smoothTrajectory(ltargetcar,ltargetpath,ltargetspeed);
Display a chase plot from behind the ego vehicle for a 3D view of the scenario..
chasePlot(egovehicle)
Create Ultrasonic Sensors
Create an ultrasonic sensor mounted at the front of the ego vehicle.
frontUltrasonic = ultrasonicDetectionGenerator(1,FieldOfView=[70 35]); frontUltrasonic.Profiles = actorProfiles(scenario);
Create a second ultrasonic sensor mounted on the left side of the ego vehicle.
leftUltrasonic = ultrasonicDetectionGenerator(2,MountingLocation=[0.5 1 0.2],MountingAngles=[90 0 0],FieldOfView=[70 35]); leftUltrasonic.Profiles = actorProfiles(scenario);
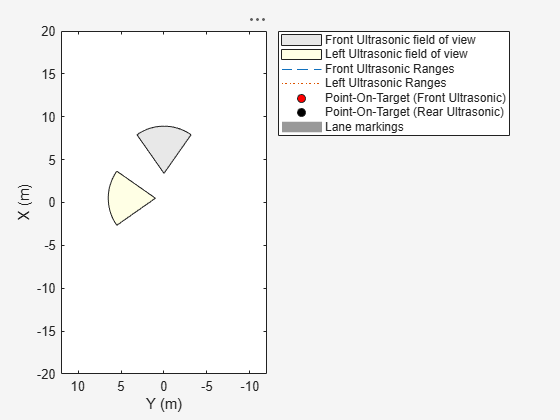
Create Bird's-Eye-Plot
Create a bird's-eye-plot for visualizing the sensor data. Add plotters for visualizing the ultrasonic coverage areas, detections, and points on targets. Use a rangeDetectionPlotter object to visualize ultrasonic detections as arcs and a detectionPlotter object to visualize the closest points on the target as markers. Add plotters to display the lane markings and vehicle outlines.
% Create bird's eye plot bep = birdsEyePlot(XLim=[-20 20],YLim=[-12 12]); % Plotters for Coverage areas of two ultrasonic sensors fcaPlotter = coverageAreaPlotter(bep,DisplayName="Front Ultrasonic field of view"); plotCoverageArea(fcaPlotter,frontUltrasonic.MountingLocation(1:2), ... frontUltrasonic.DetectionRange(3),frontUltrasonic.MountingAngles(1),frontUltrasonic.FieldOfView(1)); lcaPlotter = coverageAreaPlotter(bep,DisplayName="Left Ultrasonic field of view",FaceColor="y"); plotCoverageArea(lcaPlotter,leftUltrasonic.MountingLocation(1:2), ... leftUltrasonic.DetectionRange(3),leftUltrasonic.MountingAngles(1),leftUltrasonic.FieldOfView(1)); % Range Detection Plotters for Ultrasonic Detections frdPlotter = rangeDetectionPlotter(bep,DisplayName="Front Ultrasonic Ranges"); lrdPlotter = rangeDetectionPlotter(bep,DisplayName="Left Ultrasonic Ranges",LineStyle=":"); % Detection plotters for closest points on targets fdetPlotter = detectionPlotter(bep,DisplayName="Point-On-Target (Front Ultrasonic)",MarkerFaceColor="r"); ldetPlotter = detectionPlotter(bep,DisplayName="Point-On-Target (Rear Ultrasonic)",MarkerFaceColor="k"); % Plotters for vehicle and target outlines, lane markings olPlotter = outlinePlotter(bep); lmPlotter = laneMarkingPlotter(bep,DisplayName="Lane markings");
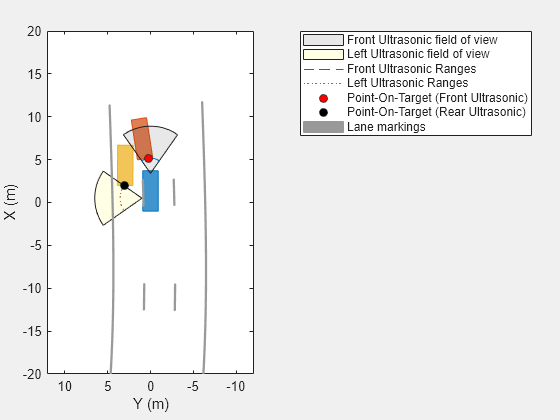
Run the Simulation and Generate Detections
Run the scenario simulation. At each timestep:
Obtain the ground truth target poses, and generate detections for the two ultrasonic sensors.
Obtain and display the target outlines and lane markings.
When there are valid detections, display the detections and the corresponding points-on-targets generated by the ultrasonic sensor.
while advance(scenario) tgtpose = targetPoses(egovehicle); [fobdets,fisValid] = frontUltrasonic(tgtpose,scenario.SimulationTime); [lobdets,lisValid] = leftUltrasonic(tgtpose,scenario.SimulationTime); [objposition,objyaw,objlength,objwidth,objoriginOffset,color] = targetOutlines(egovehicle); plotOutline(olPlotter,objposition,objyaw,objlength,objwidth, ... OriginOffset=objoriginOffset,Color=color) [lmv,lmf] = laneMarkingVertices(egovehicle); plotLaneMarking(lmPlotter,lmv,lmf) if ~isempty(fobdets) && fisValid franges = fobdets{1}.Measurement; plotRangeDetection(frdPlotter,franges,frontUltrasonic.FieldOfView(1),frontUltrasonic.MountingLocation,frontUltrasonic.MountingAngles) plotDetection(fdetPlotter,fobdets{1}.ObjectAttributes{1}.PointOnTarget(1:2)') end if ~isempty(lobdets) && lisValid lranges = lobdets{1}.Measurement; plotRangeDetection(lrdPlotter,lranges,leftUltrasonic.FieldOfView(1),leftUltrasonic.MountingLocation,leftUltrasonic.MountingAngles) plotDetection(ldetPlotter,lobdets{1}.ObjectAttributes{1}.PointOnTarget(1:2)') end end
Input Arguments
Version History
Introduced in R2022a