dsp.VariableFIRInterpolator
Description
The dsp.VariableFIRInterpolator object performs an efficient polyphase
FIR interpolation with a tunable interpolation factor. You can update the interpolation factor
and the filter coefficients while the simulation is running. To control the interpolation, you
can specify the interpolation factor or the output frame length.
When you specify the interpolation factor, if the input frame length changes (variable-size signal) during simulation, the output frame length also changes in order to keep the interpolation factor constant. When you specify the output frame length instead of the interpolation factor, and if the input frame length changes (variable-size signal) during simulation, the interpolation factor also changes in order to keep the output frame length constant.
Conceptually, the FIR interpolator (as shown in the schematic) consists of an upsampler
followed by an FIR anti-imaging filter, which is usually an approximation of an ideal
band-limited interpolation filter. To design an FIR anti-imaging filter, use the designMultirateFIR function. The upsampler upsamples each channel of the input
to a higher rate by inserting L–1 zeros between samples. The FIR filter
that follows filters each channel of the upsampled data. The resulting discrete-time signal
has a sample rate that is L times the original sample rate.

Note that the actual object algorithm implements a direct-form FIR polyphase structure, an efficient equivalent of the combined system depicted in the diagram. For more details, see Algorithms.
This object supports C and C++ code generation.
To implement the variable FIR interpolator:
Create the
dsp.VariableFIRInterpolatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
varFIRInterp = dsp.VariableFIRInterpolatordesignMultirateFIR(24,1).
varFIRInterp = dsp.VariableFIRInterpolator(Lmax)MaxInterpolationFactor property to
Lmax.
varFIRInterp = dsp.VariableFIRInterpolator(Lmax,L)InterpolationFactor property to L. The
object designs the FIR filter using
designMultirateFIR(L,1). The designed filter
corresponds to a lowpass filter with a cutoff at π/L in radial
frequency units.
varFIRInterp = dsp.VariableFIRDecimator(PropertyName=Value)varFIRInterp =
dsp.VariableFIRInterpolator(Specification="Output frame length") creates a
variable FIR interpolator object with an output frame length of 48.
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object™ as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Interpolate a sinusoidal signal whose frame length varies during simulation. The dsp.VariableFIRInterpolator object determines the frame length of the interpolated output based on the value of the Specification parameter.
Specify Interpolation Factor
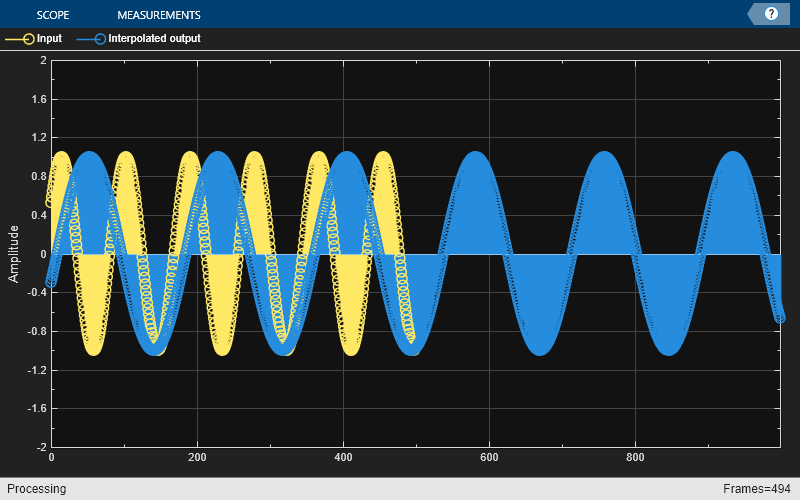
The two input sinusoidal signals have frame lengths of 1000 and 500, respectively. Initialize the dsp.VariableFIRInterpolator object with an interpolation factor of 2. Initialize the array plot to visualize the input and interpolated output signals.
Fs = 44100; sw1 = dsp.SineWave(SampleRate=Fs,... SamplesPerFrame=1000,Frequency=500); sw2 = dsp.SineWave(SampleRate=Fs,... SamplesPerFrame=500,Frequency=500); varInterp = dsp.VariableFIRInterpolator(InterpolationFactor=2)
varInterp =
dsp.VariableFIRInterpolator with properties:
Specification: 'Interpolation factor'
MaxInterpolationFactor: 24
InterpolationFactor: 2
NumeratorSource: 'Auto'
ap = dsp.ArrayPlot(YLimits=[-2 2],... ChannelNames=["Input","Interpolated output"]);
Stream in the data. Change the frame length of the input signal during simulation. In this mode, the object maintains the interpolation factor and varies the output frame length so that output frame length equals the product of input frame length and interpolation factor. View the input and output signals in an array plot.
for i = 1:100000 if i < 50000 input = sw1(); else input = sw2(); end output = varInterp(input); ap(input,output) end
release(varInterp)
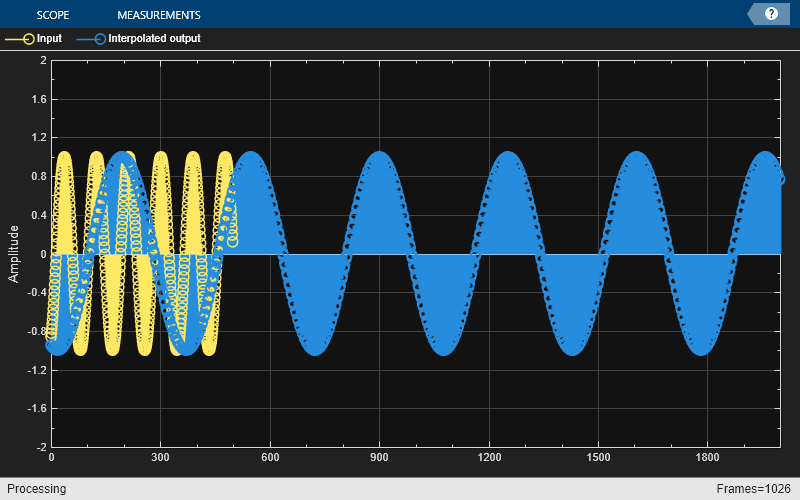
Specify Output Frame Length
Change the Specification property to 'Output frame length'. Specify the output frame length to 2000. Stream in the two input sinusoidal signals again. During simulation, when the input frame length varies, the output frame length remains constant. The object varies the interpolation factor in order to maintain the frame length of the output signal. The output frame length equals the product of the input frame length and interpolation factor.
varInterp.Specification = "Output frame length"; varInterp.OutputFrameLength = 2000; for i = 1:100000 if i < 50000 input = sw1(); else input = sw2(); end output = varInterp(input); ap(input,output) end
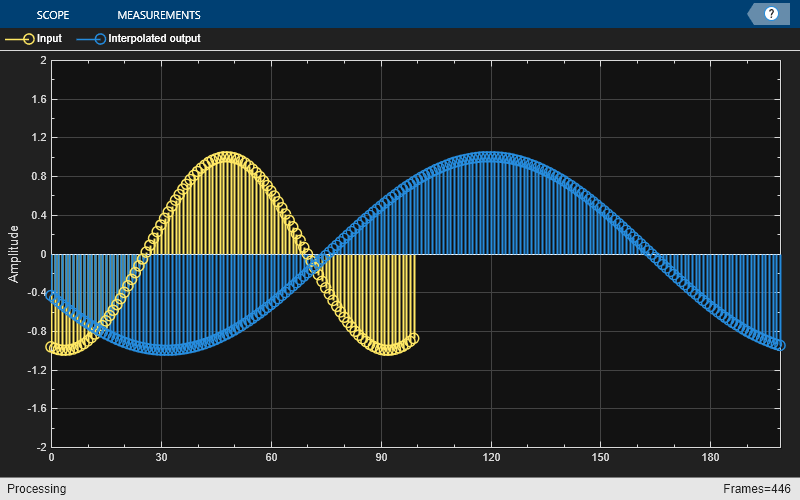
Interpolate a sinusoidal signal by varying the interpolation factor during simulation.
The input is a sinusoidal signal with a frequency of 500 Hz, sample time of 1/44100 s, and contains 100 samples per frame. Initialize the dsp.VariableFIRInterpolator object with a maximum interpolation factor of 24 and an interpolation factor of 4. Initialize the array plot to view the input and interpolated output signals.
Fs = 44100; sw = dsp.SineWave(SampleRate=Fs,SamplesPerFrame=100,Frequency=500); varInterp = dsp.VariableFIRInterpolator(24,4); ap = dsp.ArrayPlot(YLimits=[-2 2],... ChannelNames=["Input","Interpolated output"]);
Stream in the data. During simulation, change the interpolation factor to 2. The span of the interpolated output updates in the array plot display. You can change the interpolation factor to any value that is an integer factor of the maximum interpolation factor of 24.
for i = 1:100000 input = sw(); output = varInterp(input); ap(input,output); if i==50000 varInterp.InterpolationFactor = 2; end end
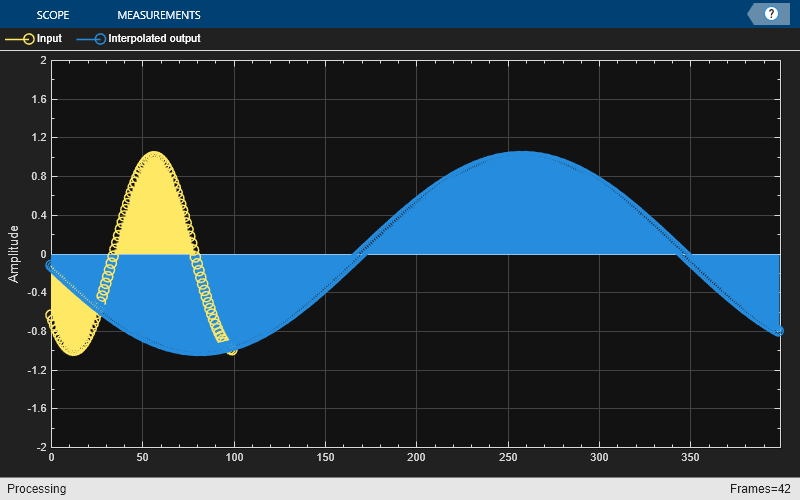
Specify the filter coefficients as an input to the dsp.VariableFIRInterpolator object. You can vary these coefficients during simulation and see the impact on the interpolator output.
The input is a sinusoidal signal with a frequency of 500 Hz, sample time of 1/44100 s, and contains 100 samples per frame. Initialize the dsp.VariableFIRInterpolator object with an interpolation factor of 4 and with the NumeratorSource property set to 'Input port'. Initialize the array plot to view the input and interpolated output signals.
Fs = 44100; sw = dsp.SineWave(SampleRate=Fs,SamplesPerFrame=100,Frequency=500); varInterp = dsp.VariableFIRInterpolator(InterpolationFactor=4,... NumeratorSource="Input port"); ap = dsp.ArrayPlot(YLimits=[-2 2],... ChannelNames=["Input","Interpolated output"]);
Stream in the input signal. Specify the filter coefficients as an input to the object algorithm. Initially, the object algorithm generates the filter coefficients using designMultirateFIR(24,1). This function generates an effective anti-imaging lowpass filter with a normalized cutoff frequency no greater than 1/24.
During simulation, change the filter coefficients to [fir1(24*16-1,1/24) zeros(1,192)]*24. The fir1 function generates the coefficients of a lowpass filter that has a similar passband frequency response and the same number of coefficients as the first filter. You cannot change the number of filter coefficients while the simulation is running.
Plot the input and interpolated output signals on an array plot. Note the impact of the change in filter coefficients on the interpolated output.
for i = 1:1500 input = sw(); if i<500 output = varInterp(input,designMultirateFIR(24,1)); else output = varInterp(input,[fir1(24*16-1,1/24) zeros(1,192)]*24); end ap(input,output); end
Algorithms
The FIR interpolation filter is implemented efficiently using a polyphase structure.
To derive the polyphase structure, start with the transfer function of the FIR filter
where N+1 is the length of the FIR filter.
You can rearrange this equation as
where Lmax is the number of polyphase components, and its value equals the maximum interpolation factor.
You can write H(z) as
where E0(zLmax), E1(zLmax), ..., ELmax-1(zLmax) are polyphase components of the FIR filter H(z).
During simulation, the algorithm reconstructs the filter H(z) based on the current interpolation factor L.
Rewriting H(z) in terms of the interpolation factor L yields
where r = Lmax/L.
Conceptually, the FIR interpolation filter contains an upsampler followed by an FIR lowpass filter H(z).

Replace H(z) with its polyphase representation.

This is the multirate noble identity for interpolation.

Applying the noble identity for interpolation moves the upsampling operation to after the filtering operation. This move enables you to filter the signal at a lower rate.
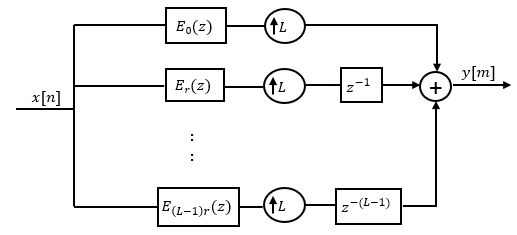
You can replace the upsampling operator, delay block, and adder with a commutator switch. The switch starts on the first branch 0 and moves in the counterclockwise direction, each time receiving one sample from each branch. The interpolator effectively outputs L samples for every one input sample it receives. Hence the sample rate at the output of the FIR interpolation filter is Lfs.

References
[1] Orfanidis, Sophocles J. Introduction to Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1996.
Extended Capabilities
Version History
Introduced in R2024b