rcsSignature
Radar cross-section pattern
Description
rcsSignature creates a radar cross-section (RCS) signature object.
You can use this object to model an angle-dependent and frequency-dependent radar
cross-section pattern. The radar cross-section determines the intensity of reflected radar
signal power from a target. The object models both polarized and non-polarized signals. The
object support several Swerling fluctuation models.
Creation
Description
rcssig = rcsSignaturercsSignature object with default property values.
rcssig = rcsSignature(Name,Value)Name,Value pair arguments.
Name is a property name and Value is the
corresponding value. Name must appear inside single quotes
(''). You can specify several name-value pair arguments in any order
as Name1,Value1,...,NameN,ValueN. Any unspecified properties take
default values.
Note
You can only set property values of rcsSignature when constructing the
object. The property values are not changeable after construction.
Properties
Object Functions
Examples
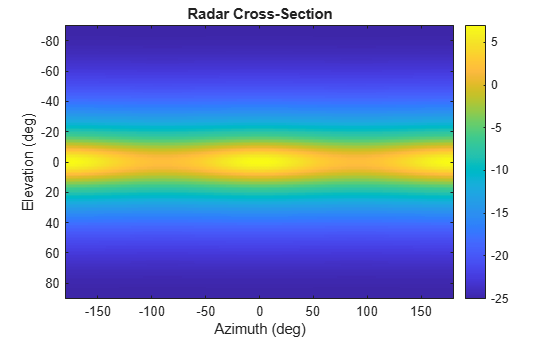
Specify the radar cross-section (RCS) of a triaxial ellipsoid and plot RCS values along an azimuth cut.
Specify the lengths of the axes of the ellipsoid. Units are in meters.
a = 0.15; b = 0.20; c = 0.95;
Create an RCS array. Specify the range of azimuth and elevation angles over which RCS is defined. Then, use an analytical model to compute the radar cross-section of the ellipsoid. Create an image of the RCS.
az = [-180:1:180]; el = [-90:1:90]; rcs = rcs_ellipsoid(a,b,c,az,el); rcsdb = 10*log10(rcs); imagesc(az,el,rcsdb) title('Radar Cross-Section') xlabel('Azimuth (deg)') ylabel('Elevation (deg)') colorbar
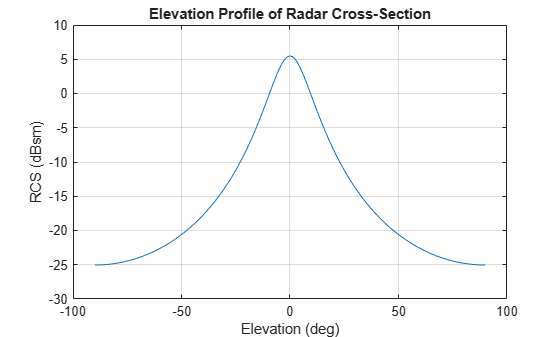
Create an rcsSignature object and plot an elevation cut at azimuth.
rcssig = rcsSignature('Pattern',rcsdb,'Azimuth',az,'Elevation',el,'Frequency',[300e6 300e6]); rcsdb1 = value(rcssig,30,el,300e6); plot(el,rcsdb1) grid title('Elevation Profile of Radar Cross-Section') xlabel('Elevation (deg)') ylabel('RCS (dBsm)')
function rcs = rcs_ellipsoid(a,b,c,az,el) sinaz = sind(az); cosaz = cosd(az); sintheta = sind(90 - el); costheta = cosd(90 - el); denom = (a^2*(sintheta'.^2)*cosaz.^2 + b^2*(sintheta'.^2)*sinaz.^2 + c^2*(costheta'.^2)*ones(size(cosaz))).^2; rcs = (pi*a^2*b^2*c^2)./denom; end
Import the radar cross-section (RCS) measurements of a 1/5th scale Boeing 737. Load the RCS data into an rcsSignature object. Assume the RCS follows a Swerling 1 distribution.
load('RCSSignatureExampleData.mat','boeing737'); rcs = rcsSignature('Pattern',boeing737.RCSdBsm, ... 'Azimuth', boeing737.Azimuth,'Elevation',boeing737.Elevation, ... 'Frequency',boeing737.Frequency,'FluctuationModel','Swerling1');
Set the seed of the random number generator for reproducibility of example.
rng(3231)
Plot sample RCS versus azimuth angle.
plot(rcs.Azimuth,rcs.Pattern) xlabel('Azimuth (deg)'); ylabel('RCS (dBsm)') title('Measured RCS from 1/5th scale Boeing 737 model')

Construct an RCS histogram and display the mean value.
N = 1000; val = zeros(1,N); for k = 1:N [val(k),expval] = value(rcs,-5,0,800.0e6); end
Convert to power units.
mean(db2pow(val))
ans = 406.9799
histogram(db2pow(val),50)
xlabel("RCS (dBsm)")
References
[1] Richards, Mark A. Fundamentals of Radar Signal Processing. New York, McGraw-Hill, 2005.
Extended Capabilities
Version History
Introduced in R2018b
See Also
value | toStruct | tsSignature