How Pattern Search Polling Works
Context
patternsearch finds a sequence of points, x0, x1, x2,
... , that approach an optimal point. The value of the objective function
either decreases or remains the same from each point in the sequence
to the next. This section explains how pattern search works for the
function described in Optimize Using the GPS Algorithm.
To simplify the explanation, this section describes how the generalized pattern search (GPS)
works using the default maximal positive basis of 2N, with the
ScaleMesh option set to false.
This section does not show how the patternsearch algorithm works with
bounds or linear constraints. For bounds and linear constraints,
patternsearch modifies poll points to be feasible at every
iteration, meaning to satisfy all bounds and linear constraints.
This section does not encompass nonlinear constraints. To understand
how patternsearch works with nonlinear constraints,
see Nonlinear Constraint Solver Algorithm for Pattern Search.
Successful Polls
The pattern search begins at the initial point x0 that
you provide. In this example, x0 = [2.1 1.7].
Iteration 1
At the first iteration, the mesh size is 1 and the GPS algorithm
adds the pattern vectors to the initial point x0 = [2.1 1.7] to compute the following mesh points:
[1 0] + x0 = [3.1 1.7] [0 1] + x0 = [2.1 2.7] [-1 0] + x0 = [1.1 1.7] [0 -1] + x0 = [2.1 0.7]
The algorithm computes the objective function at the mesh points in the order shown above. The following figure shows the value of the objective function at the initial point and mesh points.
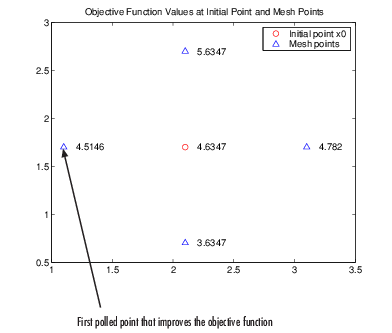
The algorithm polls the mesh points by computing their objective
function values until it finds one whose value is smaller than 4.6347,
the value at x0. In this case, the first such point
it finds is [1.1 1.7], at which
the value of the objective function is 4.5146,
so the poll at iteration 1 is successful. The
algorithm sets the next point in the sequence equal to
x1 = [1.1 1.7]
Note
By default, the GPS pattern search algorithm stops the current iteration
as soon as it finds a mesh point whose fitness value is smaller than that of
the current point. Consequently, the algorithm might not poll all the mesh
points. You can make the algorithm poll all the mesh points by setting the
UseCompletePoll option to
true.
Iteration 2
After a successful poll, the algorithm multiplies the current mesh size by 2, the default
value of the MeshExpansionFactor options. Because the initial
mesh size is 1, at the second iteration the mesh size is 2. The mesh at
iteration 2 contains the following points:
2*[1 0] + x1 = [3.1 1.7] 2*[0 1] + x1 = [1.1 3.7] 2*[-1 0] + x1 = [-0.9 1.7] 2*[0 -1] + x1 = [1.1 -0.3]
The following figure shows the point x1 and the mesh points, together with
the corresponding values of the objective function.
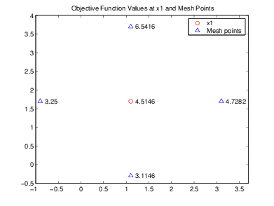
The algorithm polls the mesh points until it finds one whose
value is smaller than 4.5146, the value at x1.
The first such point it finds is [-0.9 1.7],
at which the value of the objective function is 3.25,
so the poll at iteration 2 is again successful. The algorithm sets
the second point in the sequence equal to
x2 = [-0.9 1.7]
Because the poll is successful, the algorithm multiplies the current mesh size by 2 to get a mesh size of 4 at the third iteration.
An Unsuccessful Poll
By the fourth iteration, the current point is
x3 = [-4.9 1.7]
and the mesh size is 8, so the mesh consists of the points
8*[1 0] + x3 = [3.1 1.7] 8*[0 1] + x3 = [-4.9 9.7] 8*[-1 0] + x3 = [-12.9 1.7] 8*[0 -1] + x3 = [-4.9 -1.3]
The following figure shows the mesh points and their objective function values.
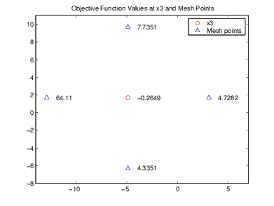
At this iteration, none of the mesh points has a smaller objective
function value than the value at x3, so the poll
is unsuccessful. In this case, the algorithm
does not change the current point at the next iteration. That is,
x4 = x3;
At the next iteration, the algorithm multiplies the current mesh size by 0.5, the default
value of the MeshContractionFactor option, so that the mesh size
at the next iteration is 4. The algorithm then polls with a smaller mesh
size.
Successful and Unsuccessful Polls in MADS
Setting the PollMethod option to "MADSPositiveBasis2N"
or "MADSPositiveBasisNp1" causes
patternsearch to use both a different poll type and to
react to polling differently than the other polling algorithms.
A MADS poll uses newly generated pseudorandom mesh vectors at each iteration. The vectors are randomly shuffled components from the columns of a random lower-triangular matrix. The components of the matrix have integer sizes up to 1/. In the poll, the mesh vectors are multiplied by the mesh size, so the poll points can be up to from the current point.
Unsuccessful polls contract the mesh by a factor of 4,
ignoring the MeshContractionFactor option. Similarly,
successful polls expand the mesh by a factor of 4,
ignoring the MeshExpansionFactor option. The maximum
mesh size is 1, despite any setting of the MaxMeshSize option.
In addition, when there is a successful poll, patternsearch starts
at the successful point and polls again. This extra poll uses the
same mesh vectors, expanded by a factor of 4 while
staying below size 1. The extra poll looks again
along the same directions that were just successful.
Displaying the Results at Each Iteration
You can display the results of the pattern search at each iteration by setting the
Display option to "iter". This enables you
to evaluate the progress of the pattern search and to make changes to
options if necessary.
With this setting, the pattern search displays information about each iteration at the command line. The first four iterations are
Iter f-count f(x) MeshSize Method
0 1 4.63474 1
1 4 4.51464 2 Successful Poll
2 7 3.25 4 Successful Poll
3 10 -0.264905 8 Successful Poll
4 14 -0.264905 4 Refine MeshThe entry Successful Poll below Method indicates
that the current iteration was successful. For example, the poll at
iteration 2 is successful. As a result, the objective function value
of the point computed at iteration 2, displayed below f(x),
is less than the value at iteration 1.
At iteration 4, the entry Refine Mesh tells
you that the poll is unsuccessful. As a result, the function value
at iteration 4 remains unchanged from iteration 3.
By default, the pattern search doubles the mesh size after each successful poll and halves it after each unsuccessful poll.
More Iterations
The pattern search performs 60 iterations before stopping. The following plot shows the points in the sequence computed in the first 13 iterations of the pattern search.
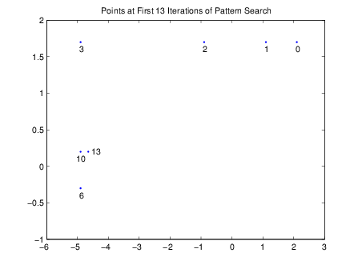
The numbers below the points indicate the first iteration at which the algorithm finds the point. The plot only shows iteration numbers corresponding to successful polls, because the best point doesn't change after an unsuccessful poll. For example, the best point at iterations 4 and 5 is the same as at iteration 3.
Poll Method
At each iteration, the pattern search polls the points in the current mesh—that is, it
computes the objective function at the mesh points to see if there is one whose
function value is less than the function value at the current point. How Pattern Search Polling Works provides an example of polling. You can
specify the pattern that defines the mesh by the PollMethod
option. The default pattern, "GPSPositiveBasis2N", consists of
the following 2N directions, where N is
the number of independent variables for the objective function.
[1 0 0...0]
[0 1 0...0]
...
[0 0 0...1]
[–1 0 0...0]
[0 –1 0...0]
[0 0 0...–1].
For example, if the objective function has three independent
variables, the GPS Positive basis 2N, consists
of the following six vectors.
[1 0 0]
[0 1 0]
[0 0 1]
[–1 0 0]
[0 –1 0]
[0
0 –1].
Alternatively, you can set the PollMethod option to
"GPSPositiveBasisNp1", the pattern consisting of the
following N + 1 directions.
[1 0 0...0]
[0 1 0...0]
...
[0 0 0...1]
[–1 –1
–1...–1].
For example, if objective function has three independent variables, the
"GPSPositiveBasisNp1" consists of the following four
vectors.
[1 0 0]
[0 1 0]
[0 0 1]
[–1 –1 –1].
A pattern search will sometimes run faster using "GPSPositiveBasisNp1"
rather than the "GPSPositiveBasis2N" as the
PollMethod, because the algorithm searches fewer points at
each iteration. Although not being addressed in this example, the same is true when
using the "MADSPositiveBasisNp1" over the
"MADSPositiveBasis2N", and similarly for GSS. For example, if
you run a pattern search on the linearly constrained example in Constrained Minimization Using patternsearch and Optimize Live Editor Task,
the algorithm performs 1588 function evaluations with
"GPSPositiveBasis2N", the default
PollMethod, but only 877 function evaluations using
"GPSPositiveBasisNp1". For more detail, see Search for Global Minimum Using patternsearch.
However, if the objective function has many local minima, using
"GPSPositiveBasis2N" as the PollMethod
might avoid finding a local minimum that is not the global minimum, because the
search explores more points around the current point at each iteration.
Complete Poll
By default, if the pattern search finds a mesh point that improves the value of the objective function, it stops the poll and sets that point as the current point for the next iteration. When this occurs, some mesh points might not get polled. Some of these unpolled points might have an objective function value that is even lower than the first one the pattern search finds.
For problems in which there are several local minima, it is sometimes preferable
to make the pattern search poll all the mesh points at each
iteration and choose the one with the best objective function value. This enables
the pattern search to explore more points at each iteration and thereby potentially
avoid a local minimum that is not the global minimum. Have the pattern search poll
the entire mesh setting the UseCompletePoll option to
true.
Stopping Conditions for the Pattern Search
The algorithm stops when any of the following conditions occurs:
The mesh size is less than the
MeshToleranceoption.The number of iterations performed by the algorithm reaches the value of the
MaxIterationsoption.The total number of objective function evaluations performed by the algorithm reaches the value of the
MaxFunctionEvaluationsoption.The time, in seconds, the algorithm runs until it reaches the value of the
MaxTimeoption.After a successful poll, the distance between the point found in the previous two iterations and the mesh size are both less than the
StepToleranceoption.After a successful poll, the change in the objective function in the previous two iterations is less than the
FunctionToleranceoption and the mesh size is less than theStepToleranceoption.
The ConstraintTolerance option is not used as stopping
criterion. It determines the feasibility with respect to nonlinear
constraints.
The MADS algorithm uses an additional parameter called the poll parameter, Δp, in the mesh size stopping criterion:
where Δm is the mesh size. The MADS stopping criterion is:
Δp ≤ MeshTolerance.
Robustness of Pattern Search
The pattern search algorithm is robust in relation to objective
function failures. This means patternsearch tolerates
function evaluations resulting in NaN, Inf,
or complex values. When the objective function at the initial point x0 is
a real, finite value, patternsearch treats poll
point failures as if the objective function values are large, and
ignores them.
For example, if all points in a poll evaluate to NaN, patternsearch considers
the poll unsuccessful, shrinks the mesh, and reevaluates. If even
one point in a poll evaluates to a smaller value than any seen yet, patternsearch considers
the poll successful, and expands the mesh.