Cartridge Valve Actuator (IL)
Actuator that maintains equilibrium between valve and pilot pressures in an isothermal liquid system

Libraries:
Simscape /
Fluids /
Isothermal Liquid /
Valves & Orifices /
Valve Actuators & Forces
Description
The Cartridge Valve Actuator (IL) block models an actuator that maintains equilibrium between the valve and pilot-line pressures. The valve between ports A and B remains closed until the pilot spring Spring preload force is surpassed, at which point the piston begins to move. The piston position is output as a physical signal at port S. A schematic of a 4-port cartridge valve actuator is shown below.
Actuator Force Balance
The actuator piston moves to adjust the pressure in the actuator chamber, which maintains equilibrium between the actuator port pressures and pilot line pressures:
where:
pA and pB are the pressures at ports A and B.
AX is calculated from the Port A to port X area ratio.
AB is the port B area, , when the Number of pressure ports is set to
3. When the Number of pressure ports is set to4, AB is .Fpreload is the initial spring force in the system.
Fpilot is if Number of pressure ports is set to
3and if Number of pressure ports is set to4.
Piston Position
The steady piston displacement is calculated as:
where ε is the Opening orientation, which assigns movement in a positive direction (extension) or negative direction (retraction). The dynamic change in piston displacement is:
where τ is the Actuator time constant. When is less than the Spring preload force, xsteady = 0.
If is greater than the sum of the preload force and kxstroke, xsteady = xstroke.
Numerically-Smoothed Force
When the actuator is close to full extension or full retraction, you can maintain numerical robustness in your simulation by adjusting the block Smoothing factor. A smoothing function is applied to all calculated forces, but primarily influences the simulation at the extremes of the piston motion.
The normalized force is
where:
FA is the force at port A.
FB is the force at port B.
FPreload is the Spring preload force.
FPilot is the force at port X.
If the Smoothing factor parameter is nonzero, the block smoothly
saturates the normalized force between 0 and
1.
For more information, see Numerical Smoothing.
Assumptions and Limitations
Internal fluid volumes are not modeled in this block. There is no mass flow rate through ports A, B, X, and Y.
Examples
This example compares the results from two test harnesses that both model a cartridge flow-control valve in an isothermal liquid network. The Cartridge Valve Insert (IL) block is a composite component, which means that it is made up of other blocks. When the Valve seat specification parameter is Conical, the Cartridge Valve Insert (IL) block is comprised of the Poppet Valve (IL) block and the Cartridge Valve Actuator (IL) block.
This example compares two test harnesses, one that uses the Cartridge Valve Insert (IL) block and one that uses the Poppet Valve (IL) and Cartridge Valve Actuator (IL) blocks to model the valve insert. A test harness is a minimum viable model that you can use to parameterize blocks, simplify comparisons, or isolate dynamics.
Model

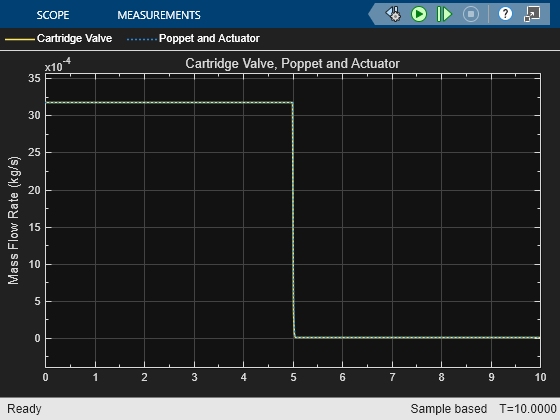
Simulation Results from Scopes
This figure shows the mass flow rate through the Cartridge Valve Insert (IL) block and the equivalent Poppet Valve (IL) block and Cartridge Valve Actuator (IL) block composite system. When the time is 5 s, the signal at port X increases by 2*10^6 Pa. This pressure increase triggers the valve to close and the flow rate to drop.
Ports
Conserving
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020a