simOptions
Option set for sim
Description
Examples
opt = simOptions;
Create an option set for sim specifying the following options.
Zero initial conditions
Input offset of 5 for the second input of a two-input model
opt = simOptions('InitialCondition','z','InputOffset',[0; 5]);
Create noise data for a simulation with 500 input data samples and two outputs.
noiseData = randn(500,2);
Create a default option set.
opt = simOptions;
Modify the option set to add the noise data.
opt.AddNoise = true; opt.NoiseData = noiseData;
Use historical input-output data as a proxy for initial conditions when simulating your model.
Load a two-input, one-output data set.
load iddata7 z7
Identify a fifth-order state-space model using the data.
sys = n4sid(z7, 5);
Split the data set into two parts.
zA = z7(1:15); zB = z7(16:end);
Simulate the model using the input signal in zB.
uSim = zB;
Simulation requires initial conditions. The signal values in zA are the historical data, that is, they are the input and output values for the time immediately preceding data in zB. Use zA as a proxy for the required initial conditions.
IO = struct('Input',zA.InputData,'Output',zA.OutputData); opt = simOptions('InitialCondition',IO);
Simulate the model.
ysim = sim(sys,uSim,opt);
To understand how the past data is mapped to the initial states of the model, see Understand Use of Historical Data for Model Simulation.
Load and plot the data.
load iddata1ic z1i plot(z1i)
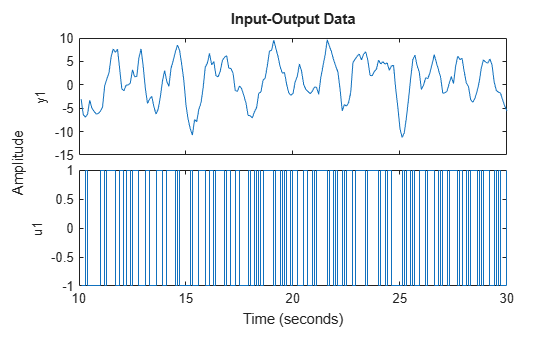
Examine the initial value of the output data y(1).
ystart = z1i.y(1)
ystart = -3.0491
The measured output does not start at 0.
Estimate a second-order transfer function sys and return the estimated initial condition ic.
[sys,ic] = tfest(z1i,2,1); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0.2957 5.2441]
Ts: 0
ic is an initialCondition object that encapsulates the free response of sys, in state-space form, to the initial state vector in X0.
Simulate sys using the estimation data but without incorporating the initial conditions. Plot the simulated output with the measured output.
y_no_ic = sim(sys,z1i);
figure
plot(y_no_ic,z1i)
legend show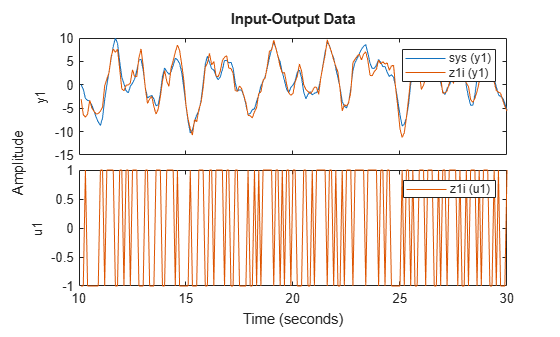
The measured and simulated outputs do not agree at the beginning of the simulation.
Incorporate the initial condition into the simOptions option set.
opt = simOptions('InitialCondition',ic); y_ic = sim(sys,z1i,opt); figure plot(y_ic,z1i) legend show
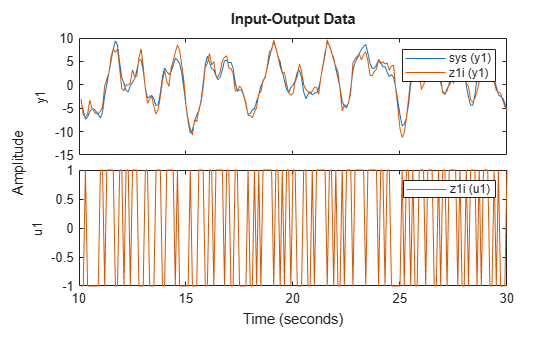
The simulation combines the model response to the input signal with the free response to the initial condition. The measured and simulated outputs now have better agreement at the beginning of the simulation. This initial condition is valid only for the estimation data z1i.