cuboidModel
Object for storing parametric cuboid model
Description
The cuboidModel object stores the parameters of a parametric
cuboid model. After you create a cuboidModel object, you can extract cuboid
corner points, and points within the cuboid using the object functions. Cuboid models are used
to store the output of pcfitcuboid
function. It is a shape fitting function which fits a cuboid over a point
cloud.
Creation
There are two ways to create a cuboidModel object.
Create a cuboid model by specifying the cuboid parameters in the
cuboidModelfunction.Fit a cuboid model over a point cloud using the
pcfitcuboidfunction.
Description
model = cuboidModel(params)params.
model = pcfitcuboid(ptCloudIn)pcfitcuboid
function stores the properties of the cuboid in a parametric cuboid model object,
model.
model = pcfitcuboid(ptCloudIn,indices)indices, in the input
point cloud.
Properties
This property is read-only.
Cuboid model parameters, stored as a nine-element row vector of the form [xctr yctr zctr xlen ylen zlen xrot yrot zrot].
xctr, yctr, and zctr specify the center of the cuboid.
xlen, ylen, and zlen specify the length of the cuboid along the x-, y-, and z-axis, respectively, before rotation has been applied.
xrot, yrot, and zrot specify the rotation angles in degrees for the cuboid along the x-, y-, and z-axis, respectively. These angles are clockwise-positive when looking in the forward direction of their corresponding axes.
The figure shows how these values determine the position of a cuboid.

These parameters are specified by the params
input argument.
Data Types: single | double
This property is read-only.
Center of the cuboid, stored as a three-element row vector of the form [xctr yctr zctr]. The vector contains the 3-D coordinates of the cuboid center in the x-, y-, and z-axis, respectively.
This property is derived from the Parameters property.
Data Types: single | double
This property is read-only.
Dimensions of the cuboid, stored as a three-element row vector of the form [xlen ylen zlen]. The vector contains the length of the cuboid along the x-, y-, and z-axis, respectively.
This property is derived from the Parameters property.
Data Types: single | double
This property is read-only.
Orientation of the cuboid, stored as a three-element row vector of the form, [xrot yrot zrot], in degrees. The vector contains the rotation of the cuboid along the x-, y-, and z-axis, respectively.
This property is derived from the Parameters property.
If the orientation is in quaternion, convert the quaternion to Euler angles in degrees to create a cuboid model.
Data Types: single | double
Object Functions
getCornerPoints | Get corner points of cuboid model |
findPointsInModel | Find points enclosed by cuboid model |
plot | Plot cuboid model |
Examples
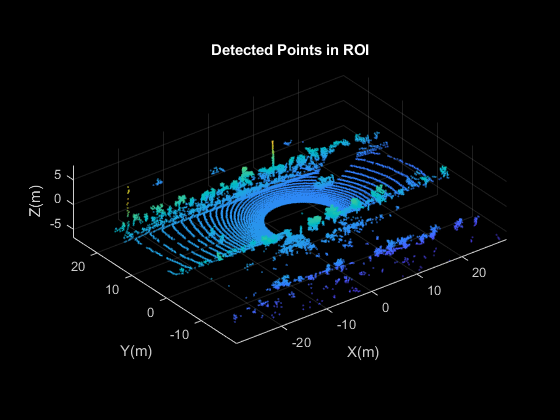
Detect a cuboid in a point cloud using pcfitcuboid function. The function stores the cuboid parameters as a cuboidModel object.
Read point cloud data into the workspace.
ptCloud = pcread('highwayScene.pcd');Search the point cloud within a specified region of interest (ROI). Create a point cloud of only the detected points.
roi = [-30 30 -20 30 -8 13]; in = findPointsInROI(ptCloud,roi); ptCloudIn = select(ptCloud,in);
Plot the point cloud of detected points.
figure pcshow(ptCloudIn.Location) xlabel('X(m)') ylabel('Y(m)') zlabel('Z(m)') title('Detected Points in ROI')
Find the indices of the points in a specified ROI within the point cloud.
roi = [9.6 13.8 7.9 9.3 -2.5 3]; sampleIndices = findPointsInROI(ptCloudIn,roi);
Fit a cuboid to the selected set of points in the point cloud.
model = pcfitcuboid(ptCloudIn,sampleIndices); figure pcshow(ptCloudIn.Location) xlabel('X(m)') ylabel('Y(m)') zlabel('Z(m)') title('Detect a Cuboid in a Point Cloud')
Plot the cuboid box in the point cloud.
hold on
plot(model)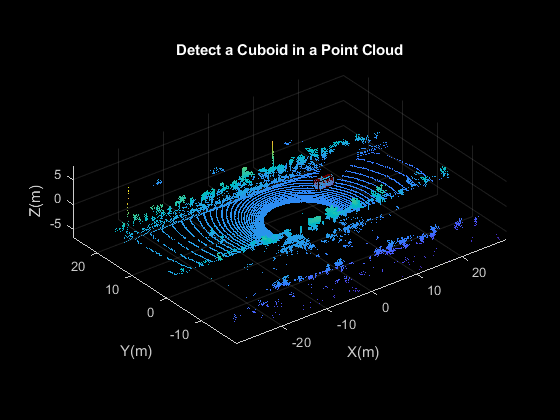
Display the internal properties of the cuboidModel object.
model
model =
cuboidModel with properties:
Parameters: [11.4873 8.5997 -1.6138 3.6713 1.3220 1.7576 0 0 0.9999]
Center: [11.4873 8.5997 -1.6138]
Dimensions: [3.6713 1.3220 1.7576]
Orientation: [0 0 0.9999]
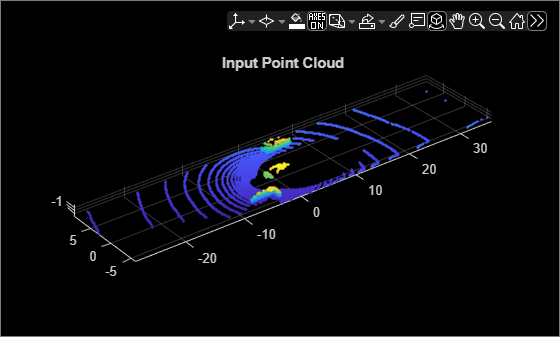
Fit cuboid bounding boxes around clusters in a point cloud.
Load the point cloud data into the workspace.
data = load('drivingLidarPoints.mat');Define and crop a region of interest (ROI) from the point cloud. Visualize the selected ROI of the point cloud.
roi = [-40 40 -6 9 -2 1]; in = findPointsInROI(data.ptCloud,roi); ptCloudIn = select(data.ptCloud,in); hcluster = figure; panel = uipanel('Parent',hcluster,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn,'MarkerSize',30,'Parent',ax) title('Input Point Cloud')
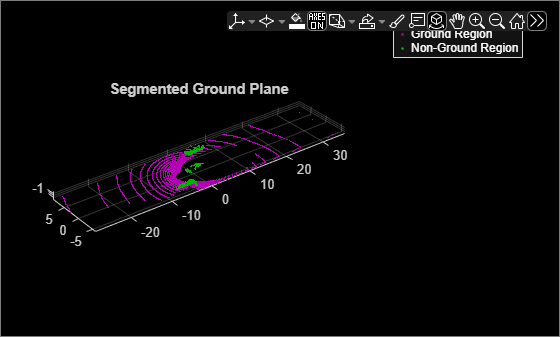
Segment the ground plane. Visualize the segmented ground plane.
maxDistance = 0.3; referenceVector = [0 0 1]; [~,inliers,outliers] = pcfitplane(ptCloudIn,maxDistance,referenceVector); ptCloudWithoutGround = select(ptCloudIn,outliers,'OutputSize','full'); hSegment = figure; panel = uipanel('Parent',hSegment,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshowpair(ptCloudIn,ptCloudWithoutGround,'Parent',ax) legend('Ground Region','Non-Ground Region','TextColor', [1 1 1]) title('Segmented Ground Plane')
Segment the non-ground region of the point cloud into clusters. Visualize the segmented point cloud.
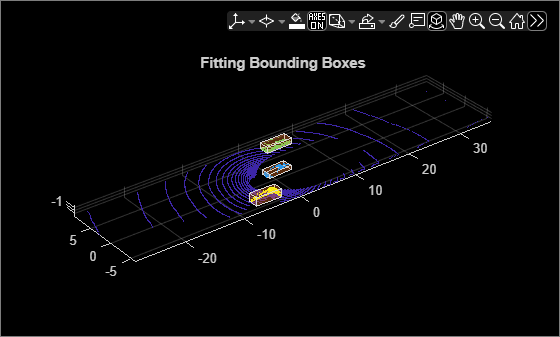
distThreshold = 1; [labels,numClusters] = pcsegdist(ptCloudWithoutGround,distThreshold); labelColorIndex = labels; hCuboid = figure; panel = uipanel('Parent',hCuboid,'BackgroundColor',[0 0 0]); ax = axes('Parent',panel,'Color',[0 0 0]); pcshow(ptCloudIn.Location,labelColorIndex,'Parent',ax) title('Fitting Bounding Boxes') hold on
Fit bounding box on each cluster, visualized as orange highlights.
for i = 1:numClusters idx = find(labels == i); model = pcfitcuboid(ptCloudWithoutGround,idx); plot(model) end
Extended Capabilities
Version History
Introduced in R2020b