detect
Syntax
Description
[___,
returns the label assigned to each bounding box. The labels used for object classes are
defined during training by using the labels] = detect(detector,ptCloud)trainPointPillarsObjectDetector function.
detectionResults = detect(detector,ptCloudArray)ptCloudArray.
detectionResults = detect(detector,DS)DS.
[___] = detect(___,Name=Value) specifies
options using one or more name-value arguments in addition to any combination of arguments
from previous syntaxes. For example,
detect(detector,ptCloud,Threshold=0.5) detects objects within the
input point cloud with a detection threshold of 0.5.
Examples
Load a pretrained PointPillars object detector into the workspace.
pretrainedDetector = load("pretrainedPointPillarsDetector.mat","detector"); detector = pretrainedDetector.detector;
Read the input point cloud using the pcread function.
ptCloud = pcread("PandasetLidarData.pcd");Run the pretrained object detector on the point cloud.
[bboxes,scores,labels] = detect(detector,ptCloud); bboxCar=bboxes(labels'=="Car",:); bboxTruck=bboxes(labels'=="Truck",:);
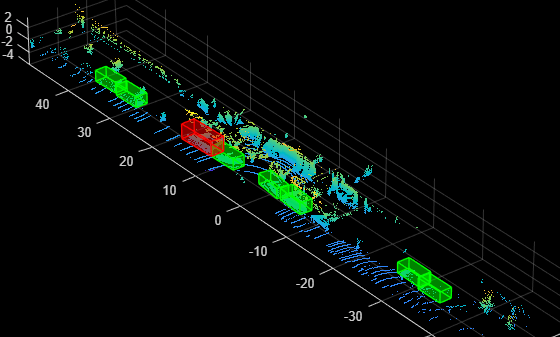
Visualize the results using the pcshow function. For better visualization, select a region of interest, roi, from the point cloud data. Display the bounding boxes for cars, trucks using the showShape function.
roi = [0.0 89.12 -49.68 49.68 -5.0 5.0]; indices = findPointsInROI(ptCloud,roi); figure ax = pcshow(select(ptCloud,indices).Location); zoom(ax,1.5) showShape("cuboid",bboxCar,Color="green",Parent=ax,Opacity=0.3,LineWidth=1) hold on; showShape("cuboid",bboxTruck,Color="red",Parent=ax,Opacity=0.3,LineWidth=1)
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2021bSee Also
Apps
Functions
Objects
Topics
- Lidar 3-D Object Detection Using PointPillars Deep Learning
- Code Generation for Lidar Object Detection Using PointPillars Deep Learning
- Unorganized to Organized Conversion of Point Clouds Using Spherical Projection
- Get Started with PointPillars
- Getting Started with Point Clouds Using Deep Learning
- Datastores for Deep Learning (Deep Learning Toolbox)