Get Started with the Lidar Labeler
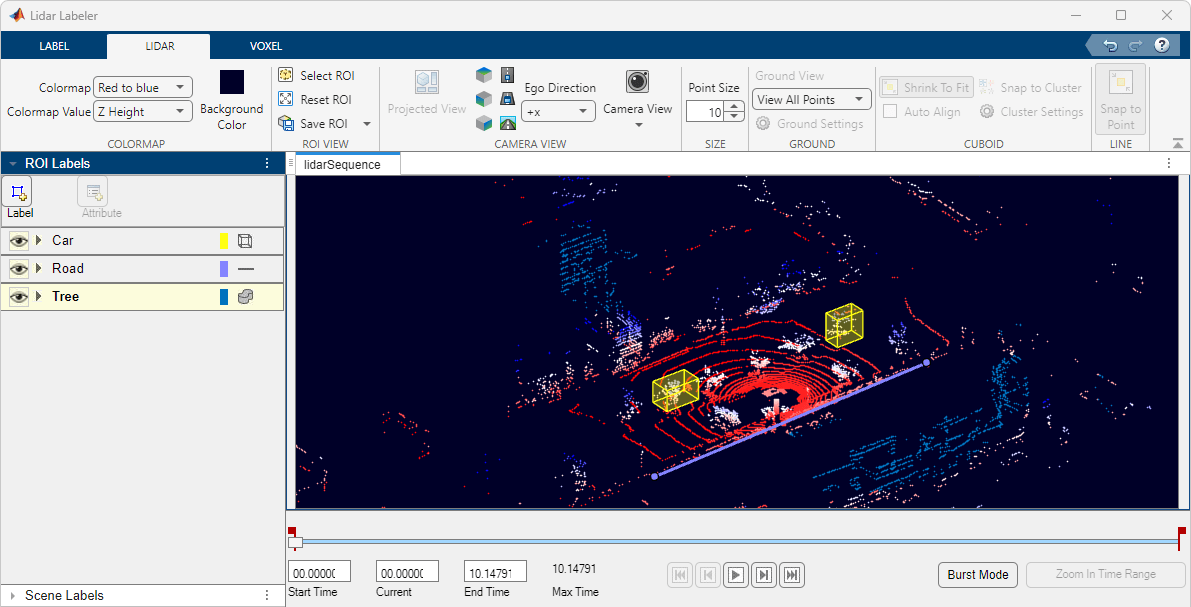
The Lidar Labeler app enables you to interactively label ground truth data in a point cloud or a point cloud sequence to generate corresponding ground truth data.
Use these steps to label point cloud data using the Lidar Labeler app.