Solving Partial Differential Equations
In a partial differential equation (PDE), the function being solved for depends on several variables, and the differential equation can include partial derivatives taken with respect to each of the variables. Partial differential equations are useful for modeling waves, heat flow, fluid dispersion, and other phenomena with spatial behavior that changes over time.
What Types of PDEs Can You Solve with MATLAB?
The MATLAB® PDE solver pdepe solves initial-boundary
value problems for systems of PDEs in one spatial variable x and
time t. You can think of these as ODEs of one variable that
also change with respect to time.
pdepe uses an informal classification for the 1-D equations
it solves:
Equations with a time derivative are parabolic. An example is the heat equation .
Equations without a time derivative are elliptic. An example is the Laplace equation .
pdepe requires at least one parabolic equation
in the system. In other words, at least one equation in the system must include a
time derivative.
pdepe also solves certain 2-D and 3-D problems that reduce to
1-D problems due to angular symmetry (see the argument description for the symmetry
constant m for more information).
Partial Differential Equation Toolbox™ extends this functionality to generalized problems in 2-D and 3-D with Dirichlet and Neumann boundary conditions.
Solving 1-D PDEs
A 1-D PDE includes a function u(x,t) that depends on time t and one spatial variable
x. The MATLAB PDE solver pdepe solves systems of 1-D parabolic
and elliptic PDEs of the form
The equation has the properties:
The PDEs hold for t0 ≤ t ≤ tf and a ≤ x ≤ b.
The spatial interval [a, b] must be finite.
mcan be 0, 1, or 2, corresponding to slab, cylindrical, or spherical symmetry, respectively. If m > 0, then a ≥ 0 must also hold.The coefficient is a flux term and is a source term.
The flux term must depend on the partial derivative ∂u/∂x.
The coupling of the partial derivatives with respect to time is restricted to multiplication by a diagonal matrix . The diagonal elements of this matrix are either zero or positive. An element that is zero corresponds to an elliptic equation, and any other element corresponds to a parabolic equation. There must be at least one parabolic equation. An element of c that corresponds to a parabolic equation can vanish at isolated values of x if they are mesh points (points where the solution is evaluated). Discontinuities in c and s due to material interfaces are permitted provided that a mesh point is placed at each interface.
Solution Process
To solve PDEs with pdepe, you must define the equation
coefficients for c, f, and
s, the initial conditions, the behavior of the solution
at the boundaries, and a mesh of points to evaluate the solution on. The
function call sol = pdepe(m,pdefun,icfun,bcfun,xmesh,tspan)
uses this information to calculate a solution on the specified mesh:
Together, the xmesh and
tspan vectors form a 2-D grid that
pdepe evaluates the solution on.
Equations
You must express the PDEs in the standard form expected by
pdepe. Written in this form, you can read off the
values of the coefficients c, f, and
s.
In MATLAB you can code the equations with a function of the form
function [c,f,s] = pdefun(x,t,u,dudx) c = 1; f = dudx; s = 0; end
pdefun defines the equation . If there are multiple equations, then c,
f, and s are vectors with each element
corresponding to one equation.Initial Conditions
At the initial time t = t0, for all x, the solution components satisfy initial conditions of the form
In MATLAB you can code the initial conditions with a function of the form
function u0 = icfun(x) u0 = 1; end
u0 = 1 defines an initial condition of u0(x,t0)
= 1. If there are multiple equations, then u0
is a vector with each element defining the initial condition of one
equation.Boundary Conditions
At the boundary x = a or x = b, for all t, the solution components satisfy boundary conditions of the form
q(x,t) is a diagonal matrix with elements that are either zero or never zero. Note that the boundary conditions are expressed in terms of the flux f, rather than the partial derivative of u with respect to x. Also, of the two coefficients p(x,t,u) and q(x,t), only p can depend on u.
In MATLAB you can code the boundary conditions with a function of the form
function [pL,qL,pR,qR] = bcfun(xL,uL,xR,uR,t) pL = uL; qL = 0; pR = uR - 1; qR = 0; end
pL
and qL are the coefficients for the left boundary, while
pR and qR are the coefficients for the
right boundary. In this case bcfun defines the boundary
conditionsIf there are multiple equations, then the outputs pL,
qL, pR, and qR are
vectors with each element defining the boundary condition of one
equation.
Integration Options
The default integration properties in the MATLAB PDE solver are selected to handle common problems. In some cases,
you can improve solver performance by overriding these default values. To do
this, use odeset to create an
options structure. Then, pass the structure to
pdepe as the last input argument:
sol = pdepe(m,pdefun,icfun,bcfun,xmesh,tspan,options)
Of the options for the underlying ODE solver ode15s, only
those shown in the following table are available for
pdepe.
Category | Option Name |
|---|---|
Error control | |
Step-size | |
Event logging |
Evaluating the Solution
After you solve an equation with pdepe, MATLAB returns the solution as a 3-D array sol, where
sol(i,j,k) contains the kth component
of the solution evaluated at t(i) and
x(j). In general, you can extract the kth
solution component with the command u = sol(:,:,k).
The time mesh you specify is used purely for output purposes, and does not
affect the internal time steps taken by the solver. However, the spatial mesh
you specify can affect the quality and speed of the solution. After solving an
equation, you can use pdeval to evaluate the
solution structure returned by pdepe with a different
spatial mesh.
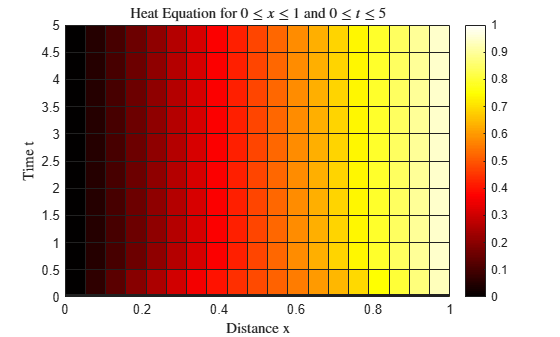
Example: The Heat Equation
An example of a parabolic PDE is the heat equation in one dimension:
This equation describes the dissipation of heat for and . The goal is to solve for the temperature . The temperature is initially a nonzero constant, so the initial condition is
Also, the temperature is zero at the left boundary, and nonzero at the right boundary, so the boundary conditions are
To solve this equation in MATLAB®, you need to code the equation, initial conditions, and boundary conditions, then select a suitable solution mesh before calling the solver pdepe. You either can include the required functions as local functions at the end of a file (as in this example), or save them as separate, named files in a directory on the MATLAB path.
Code Equation
Before you can code the equation, you need to make sure that it is in the form that the pdepe solver expects:
In this form, the heat equation is
So the values of the coefficients are as follows:
The value of is passed as an argument to pdepe, while the other coefficients are encoded in a function for the equation, which is
function [c,f,s] = heatpde(x,t,u,dudx) c = 1; f = dudx; s = 0; end
(Note: All functions are included as local functions at the end of the example.)
Code Initial Condition
The initial condition function for the heat equation assigns a constant value for . This function must accept an input for , even if it is unused.
function u0 = heatic(x) u0 = 0.5; end
Code Boundary Conditions
The standard form for the boundary conditions expected by the pdepe solver is
Written in this form, the boundary conditions for this problem are
So the values for and are
.
The corresponding function is then
function [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t) pl = ul; ql = 0; pr = ur - 1; qr = 0; end
Select Solution Mesh
Use a spatial mesh of 20 points and a time mesh of 30 points. Since the solution rapidly reaches a steady state, the time points near are more closely spaced together to capture this behavior in the output.
L = 1; x = linspace(0,L,20); t = [linspace(0,0.05,20), linspace(0.5,5,10)];
Solve Equation
Finally, solve the equation using the symmetry , the PDE equation, the initial condition, the boundary conditions, and the meshes for and .
m = 0; sol = pdepe(m,@heatpde,@heatic,@heatbc,x,t);
Plot Solution
Use pcolor to visualize the solution matrix.
colormap hot pcolor(x,t,sol) colorbar xlabel('Distance x','interpreter','latex') ylabel('Time t','interpreter','latex') title('Heat Equation for $0 \le x \le 1$ and $0 \le t \le 5$','interpreter','latex')
Local Functions
function [c,f,s] = heatpde(x,t,u,dudx) c = 1; f = dudx; s = 0; end function u0 = heatic(x) u0 = 0.5; end function [pl,ql,pr,qr] = heatbc(xl,ul,xr,ur,t) pl = ul; ql = 0; pr = ur - 1; qr = 0; end
PDE Examples and Files
Several available example files serve as excellent starting points for most common 1-D PDE problems. To explore and run examples, use the Differential Equations Examples app. To run this app, type
odeexamples
To open an individual file for editing, type
edit exampleFileName.m
To run an example, type
exampleFileName
This table contains a list of the available PDE example files.
Example File | Description | Example Link |
|---|---|---|
| Simple PDE that illustrates the formulation, computation, and plotting of the solution. | |
| Problem that involves discontinuities. | |
| Problem that requires computing values of the partial derivative. | |
| System of two PDEs whose solution has boundary layers at both ends of the interval and changes rapidly for small t. | |
| System of PDEs with step functions as initial conditions. |
References
[1] Skeel, R. D. and M. Berzins, "A Method for the Spatial Discretization of Parabolic Equations in One Space Variable," SIAM Journal on Scientific and Statistical Computing, Vol. 11, 1990, pp. 1–32.
See Also
bvp4c | ode45 | pdepe | odeset | pdeval