qr
QR decomposition
Syntax
Description
Full or Sparse Data
[___] = qr( produces an
economy-size decomposition using any of the previous output argument combinations. The
size of the outputs depends on the size of A,"econ")m-by-n
matrix A:
If
m > n, thenqrcomputes only the firstncolumns ofQand the firstnrows ofR.If
m <= n, then the economy-size decomposition is the same as the regular decomposition.
[
specifies whether to return the permutation information Q,R,P] = qr(A,outputForm)P as a matrix
or a vector. For example, if outputForm is "vector",
then A(:,P) = Q*R. The default value of outputForm
is "matrix" such that A*P = Q*R.
[___] = qr( is equivalent to
A,0)qr(A,"econ","vector"). The use of this syntax is not recommended. Use
the "econ" option instead.
Sparse Data
[___] = qr(
produces an economy-size decomposition using any of the previous output argument
combinations for sparse matrices. The size of the outputs depends on the size of
S,B,"econ")m-by-n sparse matrix S:
If
m > n, thenqrcomputes only the firstnrows ofCandR.If
m <= n, then the economy-size decomposition is the same as the regular decomposition.
[
specifies whether to return the permutation information C,R,P] = qr(S,B,outputForm)P as a matrix
or vector. For example, if outputForm is "vector",
then the least-squares solution to S*X = B is X(P,:) =
R\C. The default value of outputForm is
"matrix" such that the least-squares solution to S*X =
B is X = P*(R\C).
Examples
Find the QR decomposition of the 5-by-5 magic square matrix. Specify one output argument to return just the upper-triangular factor.
A = magic(5); R = qr(A)
R = 5×5
-32.4808 -26.6311 -21.3973 -23.7063 -25.8615
0 19.8943 12.3234 1.9439 4.0856
0 0 -24.3985 -11.6316 -3.7415
0 0 0 -20.0982 -9.9739
0 0 0 0 -16.0005
Compute the full QR decomposition of a magic square test matrix by specifying two output arguments.
A = magic(5); [Q,R] = qr(A)
Q = 5×5
-0.5234 0.5058 0.6735 -0.1215 -0.0441
-0.7081 -0.6966 -0.0177 0.0815 -0.0800
-0.1231 0.1367 -0.3558 -0.6307 -0.6646
-0.3079 0.1911 -0.4122 -0.4247 0.7200
-0.3387 0.4514 -0.4996 0.6328 -0.1774
R = 5×5
-32.4808 -26.6311 -21.3973 -23.7063 -25.8615
0 19.8943 12.3234 1.9439 4.0856
0 0 -24.3985 -11.6316 -3.7415
0 0 0 -20.0982 -9.9739
0 0 0 0 -16.0005
Verify that , within machine precision.
norm(A-Q*R)
ans = 9.3913e-15
Specify three output arguments to return a permutation matrix or vector that reduces fill-in in the R factor of the QR decomposition.
Compute the QR decomposition of the west0479 sparse matrix. Specify three outputs to return a permutation matrix that satisfies .
load west0479
A = west0479;
[Q,R,P] = qr(A);Verify that A*P = Q*R for the permutation matrix P, within machine precision.
norm(A*P-Q*R,"fro")ans = 3.3521e-10
Now specify the "vector" option to return p as a permutation vector.
[Q,R,p] = qr(A,"vector");Verify that A(:,p) = Q*R for the permutation vector p, within machine precision.
norm(A(:,p) - Q*R,"fro")ans = 3.3521e-10
Verify that the use of a permutation matrix or permutation vector in the decomposition results in an R factor with fewer nonzeros for sparse inputs compared to a nonpermuted decomposition.
[Q1,R1] = qr(A); spy(R1)
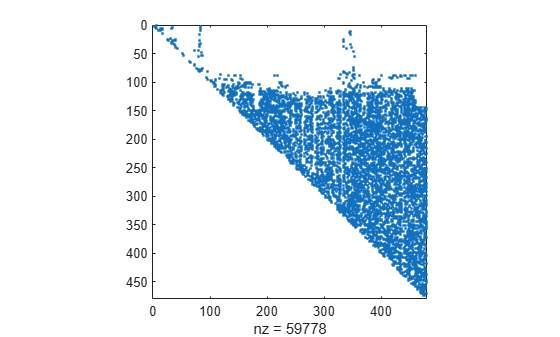
spy(R)
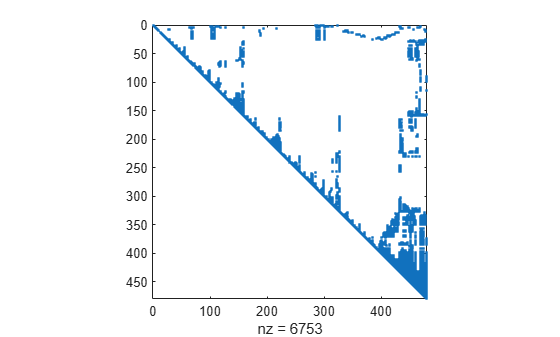
The results show that the permuted decomposition produces an R factor with substantially fewer nonzeros.
Use the economy-size QR decomposition of a coefficient matrix to solve the linear system .
Create a 10-by-5 coefficient matrix by using the first five columns of magic(10). For the right-hand side of the linear equation , use the row sums of the matrix. With this setup, the solution to the equation should be a vector of ones.
A = magic(10); A = A(:,1:5)
A = 10×5
92 99 1 8 15
98 80 7 14 16
4 81 88 20 22
85 87 19 21 3
86 93 25 2 9
17 24 76 83 90
23 5 82 89 91
79 6 13 95 97
10 12 94 96 78
11 18 100 77 84
b = sum(A,2)
b = 10×1
215
215
215
215
215
290
290
290
290
290
Compute the economy-size QR decomposition of A. Then solve the linear system with x(p,:) = R\(Q'*b). Because Q is orthogonal, this equation is the same as x(p,:) = R\(Q\b) but is computed faster.
[Q,R,p] = qr(A,"econ","vector")
Q = 10×5
-0.0050 -0.4775 -0.0504 0.5193 0.0399
-0.0349 -0.5001 -0.0990 -0.1954 -0.2006
-0.4384 0.1059 -0.4660 0.4464 0.0628
-0.0947 -0.4151 -0.2923 -0.2542 0.5274
-0.1246 -0.4117 -0.2812 -0.1326 -0.4130
-0.3787 0.0209 0.2702 0.4697 0.0390
-0.4085 -0.0017 0.2217 -0.2450 -0.2015
-0.0648 -0.3925 0.6939 0.0669 0.1225
-0.4683 0.0833 0.0283 -0.3038 0.5265
-0.4982 0.0867 0.0394 -0.1822 -0.4138
R = 5×5
-200.7112 -55.5026 -167.6040 -84.7237 -168.7997
0 -192.1053 -40.3557 -152.4040 -39.2814
0 0 101.3180 -89.4254 96.0172
0 0 0 41.0248 -14.9083
0 0 0 0 24.6386
p = 1×5
3 1 5 2 4
x(p,:) = R\(Q'*b)
x = 5×1
1.0000
1.0000
1.0000
1.0000
1.0000
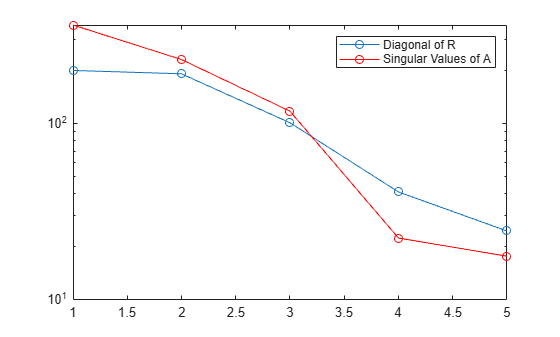
Make a semilog plot of the diagonal of R to confirm that the permuted decomposition produces an R factor with abs(diag(R)) decreasing. Plot the singular values of A in the same plot for comparison. In practice, the diagonal values of R behave in a similar way to the singular values of A. Therefore, you can use the diagonal values of R as a measure for how close to singular the matrix A is.
semilogy(abs(diag(R)),"-o") hold on semilogy(svd(A),"r-o") legend("Diagonal of R","Singular Values of A")
Solve a sparse linear system and use the results to see how much of vector b lies in the column space of S.
Create a random 500-by-20 sparse matrix with 10% density and a vector of ones. Use qr to factorize the matrix into the factors R and C = Q'*b.
S = sprand(500,20,0.1);
b = ones(500,1);
[C,R] = qr(S,b,"econ");Use the results to solve with x = R\C.
x = R\C;
Consider the identity.
Dividing through by the norm of b, you get a new identity that shows how much of b lies in the column space of S:
.
The first term tells how much of b does not lie in the column space of S, while the second term tells how much of b does lie in the column space of S.
t1 = norm(S*x-b)^2/norm(b)^2
t1 = 0.4000
t2 = norm(C)^2/norm(b)^2
t2 = 0.6000
Use qr to solve the matrix equation with a rectangular sparse coefficient matrix .
Load the west0479 sparse matrix and use the first 200 columns as the rectangular coefficient matrix in a linear system. For the right-hand side of the equation, use the row sums of . With this setup, the solution to is a vector of ones.
load west0479
S = west0479(:,1:200);
B = sum(S,2);Solve using qr with two inputs and three outputs. The solution to the linear system is x = P*(R\C).
[C,R,P] = qr(S,B); x = P*(R\C);
Verify that , within machine precision.
norm(S*x-B)
ans = 8.3874e-11
Note: To calculate the upper-triangular factor R and permutation matrix P, but avoid computing the orthogonal matrix Q (which is often the most computationally expensive part of a call to qr), you can specify B as an empty matrix:
emptyB = zeros(size(S,1),0); [~,R,P] = qr(S,emptyB);
Input Arguments
Output Arguments
Tips
To solve multiple linear systems involving the same coefficient matrix, use
decompositionobjects.For the syntax
[C,R] = qr(S,B), the value ofX = R\Cis a least-squares solution toS*X = Bonly whenSdoes not have low rank.
References
[1] Anderson, E., ed. LAPACK Users’ Guide. 3rd ed. Software, Environments, Tools. Philadelphia: Society for Industrial and Applied Mathematics, 1999. https://doi.org/10.1137/1.9780898719604.
[2] Davis, Timothy A. “Algorithm 915, SuiteSparseQR: Multifrontal Multithreaded Rank-Revealing Sparse QR Factorization.” ACM Transactions on Mathematical Software 38, no. 1 (November 2011): 1–22. https://doi.org/10.1145/2049662.2049670.
Extended Capabilities
Version History
Introduced before R2006aSee Also
lu | chol | null | orth | qrdelete | qrinsert | qrupdate | decomposition | lsqminnorm | rank