readOrientation
Read orientation data from BNO055 sensor
Description
Add-On Required: This feature requires the MATLAB Support Package for Arduino Hardware add-on.
Examples
Read Orientation from Sensor
Create an arduino object
a = arduino('COM4', 'Uno', 'Libraries', 'I2C');
Create the BNO055 sensor object.
imu = bno055(a,'OperatingMode','ndof');
Calibrate the sensor using steps mentioned in Calibrate BNO055 Sensors
tic; while (toc < 120) [status,timestamp] = readCalibrationStatus(imu); if strcmpi(status.System,'full') && strcmpi(status.Magnetometer,'full') && strcmpi(status.Accelerometer,'full') && strcmpi(status.Gyroscope,'full') break; %System is calibrated proceed further end end
Read orientation data.
[readVal,timestamp] = readOrientation(imu)
readVal = 3×1
6.2046 3.0729 -0.3011
timestamp = datetime datetime
21-Jul-2020 14:09:57.615Input Arguments
Output Arguments
The following illustration shows the default orientation of the x-, y-, and z- axes of the BNO055 sensor.
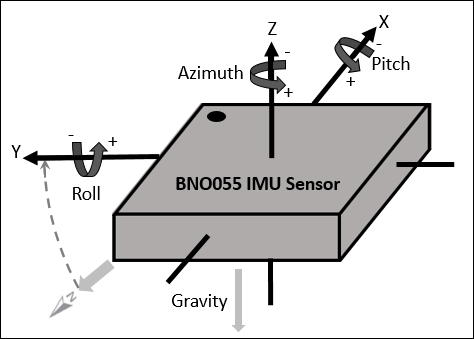
Orientation of the sensor, returned as a 3-by-1 vector. The elements of the vector represent the orientation using three angular quantities in radians - azimuth (rotation around z- axis), roll (rotation around y- axis), and pitch (rotation around x- axis) of the sensor.
| Angular Quantity | Description | Range in Radians |
|---|---|---|
| Azimuth | Angle between y- axis of the sensor and magnetic north | [0,2pi]
|
| Pitch | Angle between z- axis and y- axis of the sensor | [-pi,pi] |
| Roll | Angle between z- axis and x- axis of the sensor | [-pi/2,pi/2] |
Data Types: double
The time at which MATLAB® receives the orientation from the sensor, specified as a datetime.
Data Types: datetime
More About
Version History
Introduced in R2019b
See Also
bno055 | flush | info | read | readAcceleration | readAngularVelocity | readCalibrationStatus | readMagneticField | release