mpcsimopt
MPC simulation options
Description
When simulating an implicit or explicit MPC controller using the sim function, you can specify additional simulation options using an
mpcsimopt object.
Creation
Syntax
Description
options = mpcsimopt;sim function. To specify nondefault values for the properties, use dot
notation.
Properties
Object Functions
sim | Simulate an MPC controller in closed loop with a linear plant |
Examples
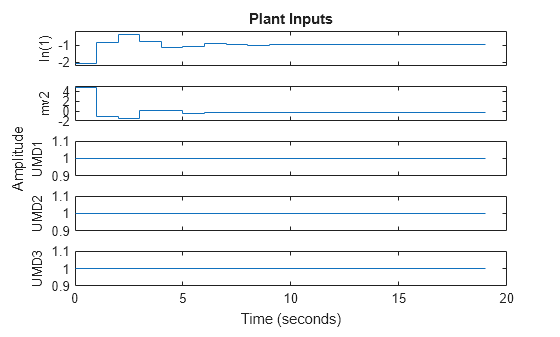
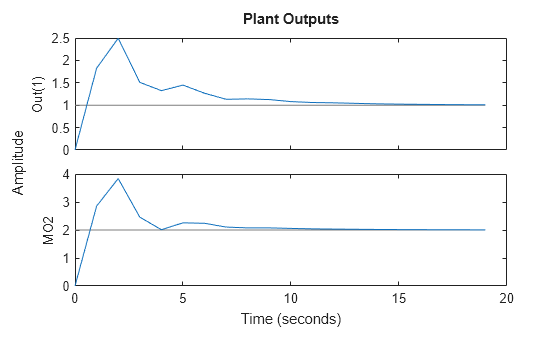
Simulate the MPC control of a multi-input, multi-output (MIMO) system with a mismatch between the predicted and actual plant models. The system has two manipulated variables, two unmeasured disturbances, and two measured outputs.
Define the predicted plant model.
p1 = tf(1,[1 2 1])*[1 1;0 1];
plantPredict = ss([p1 p1]);
plantPredict.InputName = {'mv1','mv2','umd3','umd4'};Specify the MPC signal types.
plantPredict = setmpcsignals(plantPredict,'MV',[1 2],'UD',[3 4]);
Create the MPC controller.
mpcobj = mpc(plantPredict,1,40,2);
-->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
Define the unmeasured input disturbance model used by the controller.
distModel = eye(2,2)*ss(-0.5,1,1,0); mpcobj.Model.Disturbance = distModel;
Define an actual plant model which differs from the predicted model and has unforeseen unmeasured disturbance inputs.
p2 = tf(1.5,[0.1 1 2 1])*[1 1;0 1]; plantActual = ss([p2 p2 tf(1,[1 1])*[0;1]]); plantActual = setmpcsignals(plantActual,'MV',[1 2],'UD',[3 4 5]);
Configure the unmeasured disturbance and output reference trajectories.
dist = ones(1,3); refs = [1 2];
Create and configure a simulation option set.
options = mpcsimopt(mpcobj); options.UnmeasuredDisturbance = dist; options.Model = plantActual;
Simulate the system.
sim(mpcobj,20,refs,options)
-->Converting model to discrete time. -->Integrator added as output disturbance model for measured output #1. -->Integrator added as output disturbance model for measured output #2. -->"Model.Noise" is empty. Assuming white noise on each measured output. -->Converting model to discrete time. -->"PredictionHorizon" is empty. Assuming default 10. -->"ControlHorizon" is empty. Assuming default 2. -->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
Version History
Introduced before R2006a