addPointLandmark
Add landmark point node to pose graph
Syntax
Description
addPointLandmark(
adds a landmark point node, based on the input position
poseGraph,measurement)measurement that connects to the last pose node in the pose
graph. To add pose measurement nodes, see the addRelativePose function.
addPointLandmark(
also specifies the information matrix as part of the edge constraint, which
represents the uncertainty of the landmark measurement.poseGraph,measurement,infoMat)
addPointLandmark(
adds a new landmark point node and connects it to the pose node specified by
poseGraph,measurement,infoMat,poseNodeID)poseNodeID.
addPointLandmark(
creates an edge by specifying a point measurement between existing nodes, specified
by poseGraph,measurement,infoMat,poseNodeID,pointNodeID)poseNodeID and pointNodeID. If the node
pair already exists, the function appends the new measurement.
Examples
Create a 2-D pose graph object.
pg = poseGraph;
Add relative poses to the pose graph.
addRelativePose(pg,[1 1 pi/2]); addRelativePose(pg,[2 2 pi/3]);
Add a landmark point node to the last pose node in the pose graph.
addPointLandmark(pg,[1 1]); show(pg);
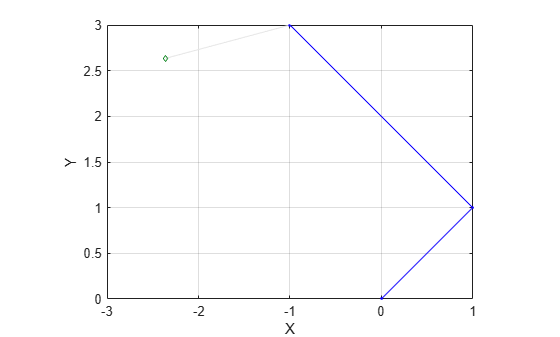
List all poses in the pose graph.
nodeEstimates(pg)
ans = 4×3
0 0 0
1.0000 1.0000 1.5708
-1.0000 3.0000 2.6180
-2.3660 2.6340 NaN
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2021a