Constrained Nonlinear Problem Using Optimize Live Editor Task or Solver
Typical Optimization Problem
This example shows how to solve a constrained nonlinear problem using an Optimization Toolbox™ solver. The example demonstrates the typical workflow: create an objective function, create constraints, solve the problem, and examine the results.
This example provides two approaches to solving the problem. One uses the Optimize Live Editor task, a visual approach. The other uses the MATLAB® command line, a text-based approach. You can also solve this type of problem using the problem-based approach; see Solve a Constrained Nonlinear Problem, Problem-Based.
Problem Formulation: Rosenbrock's Function
The problem is to minimize Rosenbrock's function
over the unit disk, that is, the disk of radius 1 centered at the origin. In other words, find x that minimizes the function f(x) over the set . This problem is a minimization of a nonlinear function with a nonlinear constraint.
Note
Rosenbrock's function is a standard test function in optimization. It has a
unique minimum value of 0 attained at the point [1,1].
Finding the minimum is a challenge for some algorithms because the function has
a shallow minimum inside a deeply curved valley. The solution for this problem
is not at the point [1,1] because that point does not satisfy
the constraint.
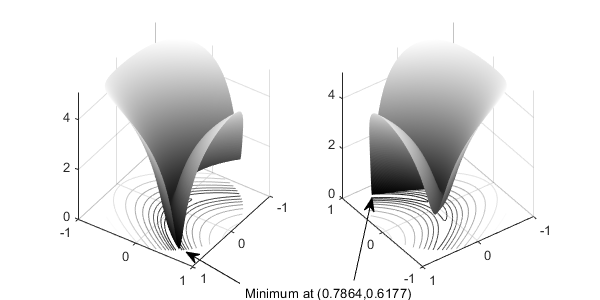
This figure shows two views of Rosenbrock's function in the unit disk. The vertical axis is log-scaled; in other words, the plot shows log(1+f(x)). Contour lines lie beneath the surface plot.
Rosenbrock's Function, Log-Scaled: Two Views
![]() Code for Generating the Figure
Code for Generating the Figure
The function f(x) is called the objective function. The objective function is the function you want to minimize. The inequality is called a constraint. Constraints limit the set of x over which a solver searches for a minimum. You can have any number of constraints, which are inequalities or equalities.
All Optimization Toolbox optimization functions minimize an objective function. To maximize a function f, apply an optimization routine to minimize –f. For more details about maximizing, see Maximizing an Objective.
Define and Solve Problem Using Optimize Live Editor Task
The Optimize Live Editor task lets you set up and solve the problem using a visual approach.
Create a new live script by clicking the New Live Script button on the File section of the Home tab.

Insert an Optimize Live Editor task. Click the Insert tab and then, in the Code section, select Task > Optimize.

Choose the solver-based task.
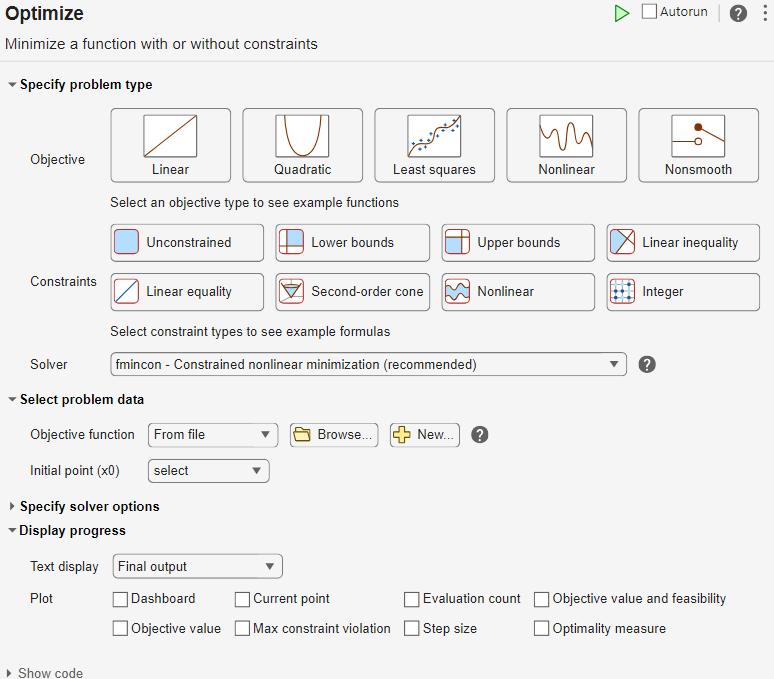
In the Specify problem type section of the task, select Objective > Nonlinear and Constraints > Nonlinear. The task selects the solver
fmincon - Constrained nonlinear minimization.Include Rosenbrock's function as the objective function. In the Select problem data section of the task, select Objective function > Local function and then click the New... button. A new local function appears in a section below the task.
function f = objectiveFcn(optimInput) % Example: % Minimize Rosenbrock's function % f = 100*(y - x^2)^2 + (1 - x)^2 % Edit the lines below with your calculation x = optimInput(1); y = optimInput(2); f = 100*(y - x^2)^2 + (1 - x)^2; end
This function implements Rosenbrock's function.
In the Select problem data section of the task, select Objective function > objectiveFcn.
Place the initial point
x0 = [0;0]into the MATLAB workspace. Insert a new section above the Optimize task by clicking the task, then clicking the Section Break button on the Insert tab. In the new section above the task, enter the following code for the initial point.x0 = [0;0];
Run the section by pressing Ctrl+Enter. This action places
x0into the workspace.In the Select problem data section of the task, select Initial point (x0) > x0.

In the Select problem data section, select Constraints > Nonlinear > Local function and then click the New... button. A new local function appears below the previous local function.
Edit the new local function as follows.
function [ineqnonlin,eqnonlin] = unitdisk(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = [ ]; end
In the Select problem data section, select
unitdiskas the constraint function.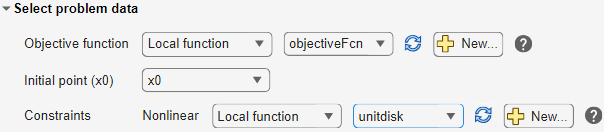
To monitor the solver progress, in the Display progress section of the task, select Text display > Each iteration. Also, select Objective value and feasibility for the plot.

To run the solver, click the options button ⁝ at the top right of the task window, and select Run Section. The plot appears in a separate figure window and in the output area.
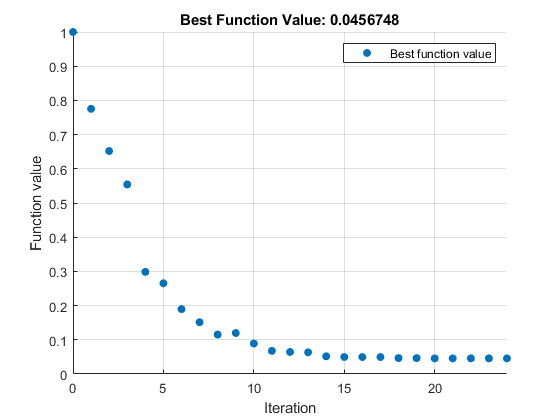
The output area shows a table of iterations, discussed in Interpret Result.
To find the solution, look at the top of the task.

The solver places the variables
solutionandobjectiveValuein the workspace. View their values by inserting a new section break below the task and entering these lines.
Run the section by pressing Ctrl+Enter.
![solution = [0.7864,0.6177]. objectiveValue = 0.0457.](optimizelet_viewsolution_result.png)
To understand the
fminconprocess for obtaining the result, see Interpret Result.To display the code that Optimize generates to solve the problem, click the options button ⁝ at the top right of the task window, and select Controls and Code.
At the bottom of the task, the following code appears.
% Set nondefault solver options options = optimoptions("fmincon",Display="iter",... PlotFcn="optimplotfvalconstr"); % Solve [solution,objectiveValue] = fmincon(@objectiveFcn,x0,[],[],[],[],[],[],... @unitdisk,options);
This code is the code you use to solve the problem at the command line, as described next.
Define and Solve Problem at Command Line
The first step in solving an optimization problem at the command line is to choose
a solver. Consult the Optimization Decision Table. For a problem with a nonlinear objective
function and a nonlinear constraint, generally you use the
fmincon solver.
Consult the fmincon function reference page. The
solver syntax is as follows.
[x,fval] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
The fun and nonlcon inputs represent the
objective function and nonlinear constraint functions, respectively.
Express your problem as follows:
Define the objective function in the MATLAB language, as a function file or anonymous function. This example uses a function file.
Define the constraints as a separate file or anonymous function.
A function file is a text file that contains MATLAB commands and has the extension .m. Create a
function file in any text editor, or use the built-in MATLAB Editor as in this example.
At the command line, enter:
edit rosenbrockIn the MATLAB Editor, enter:
%% ROSENBROCK(x) expects a two-column matrix and returns a column vector % The output is the Rosenbrock function, which has a minimum at % (1,1) of value 0, and is strictly positive everywhere else. function f = rosenbrock(x) f = 100*(x(:,2) - x(:,1).^2).^2 + (1 - x(:,1)).^2; end
Note
rosenbrockis a vectorized function that can compute values for several points at once. See Vectorization. A vectorized function is best for plotting. For a nonvectorized version, enter:%% ROSENBROCK1(x) expects a two-element vector and returns a scalar % The output is the Rosenbrock function, which has a minimum at % (1,1) of value 0, and is strictly positive everywhere else. function f = rosenbrock1(x) f = 100*(x(2) - x(1)^2)^2 + (1 - x(1))^2; end
Save the file with the name
rosenbrock.m.
Constraint functions have the form ineqnonlin(x) ≤ 0 or eqnonlin(x) = 0. The constraint is not in the form that the solver handles. To have the correct syntax, reformulate the constraint as .
The syntax for nonlinear constraints returns both equality and inequality
constraints. This example includes only an inequality constraint, so you must pass
an empty array [] as the equality constraint function
ceq.
With these considerations in mind, write a function file for the nonlinear constraint.
Create a file named
unitdisk.mcontaining the following code:function [ineqnonlin,eqnonlin] = unitdisk(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = [ ]; end
Save the file
unitdisk.m.Create function handles to the objective and constraint functions. These function handles point to the functions, and are a way for the solver to access the functions.
fun = @rosenbrock; nonlcon = @unitdisk;
Now that you have defined the objective and constraint functions, create the other
fmincon inputs.
Create options for
fminconto use the"optimplotfvalconstr"plot function and to return iterative display.options = optimoptions("fmincon",... PlotFcn="optimplotfvalconstr",... Display="iter");
Create the initial point.
x0 = [0 0];
Create empty entries for the constraints that this example does not use.
A = []; b = []; Aeq = []; beq = []; lb = []; ub = [];
Solve the problem by calling fmincon.
[x,fval] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
First-order Norm of
Iter F-count f(x) Feasibility optimality step
0 3 1.000000e+00 0.000e+00 2.000e+00
1 13 7.753537e-01 0.000e+00 6.250e+00 1.768e-01
2 18 6.519648e-01 0.000e+00 9.048e+00 1.679e-01
3 21 5.543209e-01 0.000e+00 8.033e+00 1.203e-01
4 24 2.985207e-01 0.000e+00 1.790e+00 9.328e-02
5 27 2.653799e-01 0.000e+00 2.788e+00 5.723e-02
6 30 1.897216e-01 0.000e+00 2.311e+00 1.147e-01
7 33 1.513701e-01 0.000e+00 9.706e-01 5.764e-02
8 36 1.153330e-01 0.000e+00 1.127e+00 8.169e-02
9 39 1.198058e-01 0.000e+00 1.000e-01 1.522e-02
10 42 8.910052e-02 0.000e+00 8.378e-01 8.301e-02
11 45 6.771960e-02 0.000e+00 1.365e+00 7.149e-02
12 48 6.437664e-02 0.000e+00 1.146e-01 5.701e-03
13 51 6.329037e-02 0.000e+00 1.883e-02 3.774e-03
14 54 5.161934e-02 0.000e+00 3.016e-01 4.464e-02
15 57 4.964194e-02 0.000e+00 7.913e-02 7.894e-03
16 60 4.955404e-02 0.000e+00 5.462e-03 4.185e-04
17 63 4.954839e-02 0.000e+00 3.993e-03 2.208e-05
18 66 4.658289e-02 0.000e+00 1.318e-02 1.255e-02
19 69 4.647011e-02 0.000e+00 8.006e-04 4.940e-04
20 72 4.569141e-02 0.000e+00 3.136e-03 3.379e-03
21 75 4.568281e-02 0.000e+00 6.440e-05 3.974e-05
22 78 4.568281e-02 0.000e+00 8.000e-06 1.084e-07
23 81 4.567641e-02 0.000e+00 1.601e-06 2.793e-05
24 84 4.567482e-02 0.000e+00 2.023e-08 6.916e-06
Local minimum found that satisfies the constraints.
Optimization completed because the objective function is non-decreasing in
feasible directions, to within the value of the optimality tolerance,
and constraints are satisfied to within the value of the constraint tolerance.
x =
0.7864 0.6177
fval =
0.0457
The exit message tells you that the search for a constrained optimum ended because the derivative of the objective function is nearly 0 in directions allowed by the constraint, and that the constraint is satisfied to the required accuracy. Several phrases in the message contain links to more information about the terms used in the message. For more details about these links, see Enhanced Exit Messages.
Interpret Result
The iteration table in both the Live Editor task output area and the MATLAB Command Window shows how MATLAB searched for the minimum value of Rosenbrock's function in the unit disk. Your table can differ, depending on toolbox version and computing platform. The following description applies to the table shown in this example.
The first column, labeled
Iter, is the iteration number from 0 to 24.fmincontook 24 iterations to converge.The second column, labeled
F-count, reports the cumulative number of times Rosenbrock's function was evaluated. The final row shows anF-countof 84, indicating thatfminconevaluated Rosenbrock's function 84 times in the process of finding a minimum.The third column, labeled
f(x), displays the value of the objective function. The final value,4.567482e-2, is the minimum reported in the Optimize run, and at the end of the exit message in the Command Window.The fourth column,
Feasibility, is 0 for all iterations. This column shows the value of the constraint functionunitdiskat each iteration where the constraint is positive. Because the value ofunitdiskwas negative in all iterations, every iteration satisfied the constraint.
The other columns of the iteration table are described in Iterative Display.