evaluate
Interpolate data to selected locations
This function supports the legacy workflow. Using the [p,e,t]
representation of FEMesh data is not recommended. Use interpolateSolution and evaluateGradient to interpolate a PDE solution and its gradient to
arbitrary points without switching to a [p,e,t]
representation.
Description
Examples
This example shows how to interpolate a solution to a scalar problem using a pOut matrix of values.
Solve the equation on the unit disk with zero Dirichlet conditions.
g0 = [1;0;0;1]; % circle centered at (0,0) with radius 1 sf = 'C1'; g = decsg(g0,sf,sf'); % decomposed geometry matrix model = createpde; gm = geometryFromEdges(model,g); % Zero Dirichlet conditions applyBoundaryCondition(model,"dirichlet", ... "Edge",(1:gm.NumEdges), ... "u",0); [p,e,t] = initmesh(gm); c = 1; a = 0; f = 1; u = assempde(model,p,e,t,c,a,f); % solve the PDE
Construct an interpolator for the solution.
F = pdeInterpolant(p,t,u);
Generate a random set of coordinates in the unit square. Evaluate the interpolated solution at the random points.
rng default % for reproducibility pOut = rand(2,25); % 25 numbers between 0 and 1 uOut = evaluate(F,pOut); numNaN = sum(isnan(uOut))
numNaN = 9
uOut contains some NaN entries because some points in pOut are outside of the unit disk.
This example shows how to interpolate a solution to a scalar problem using x, y values.
Solve the equation on the unit disk with zero Dirichlet conditions.
g0 = [1;0;0;1]; % circle centered at (0,0) with radius 1 sf = 'C1'; g = decsg(g0,sf,sf'); % decomposed geometry matrix model = createpde; gm = geometryFromEdges(model,g); % Zero Dirichlet conditions applyBoundaryCondition(model,"dirichlet", ... "Edge",(1:gm.NumEdges), ... "u",0); [p,e,t] = initmesh(gm); c = 1; a = 0; f = 1; u = assempde(model,p,e,t,c,a,f); % solve the PDE
Construct an interpolator for the solution.
F = pdeInterpolant(p,t,u); % create the interpolantEvaluate the interpolated solution at grid points in the unit square with spacing 0.2.
[x,y] = meshgrid(0:0.2:1); uOut = evaluate(F,x,y); numNaN = sum(isnan(uOut))
numNaN = 12
uOut contains some NaN entries because some points in the unit square are outside of the unit disk.
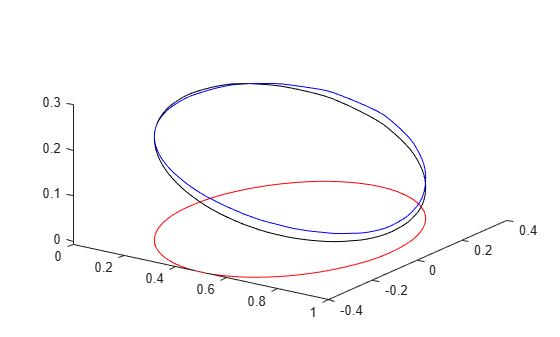
This example shows how to interpolate the solution to a system of N = 3 equations.
Solve the system of equations with Dirichlet boundary conditions on the unit disk, where
g0 = [1;0;0;1]; % circle centered at (0,0) with radius 1 sf = 'C1'; g = decsg(g0,sf,sf'); % decomposed geometry matrix model = createpde(3); gm = geometryFromEdges(model,g); applyBoundaryCondition(model,"dirichlet", ... "Edge",(1:gm.NumEdges), ... "u",zeros(3,1)); [p,e,t] = initmesh(g); c = 1; a = 0; f = char('sin(x) + cos(y)','cosh(x.*y)','x.*y./(1+x.^2+y.^2)'); u = assempde(model,p,e,t,c,a,f); % solve the PDE
Construct an interpolant for the solution.
F = pdeInterpolant(p,t,u); % create the interpolantInterpolate the solution at a circle.
s = linspace(0,2*pi); x = 0.5 + 0.4*cos(s); y = 0.4*sin(s); uOut = evaluate(F,x,y);
Plot the three solution components.
npts = length(x); plot3(x,y,uOut(1:npts),"b") hold on plot3(x,y,uOut(npts+1:2*npts),"k") plot3(x,y,uOut(2*npts+1:end),"r") hold off view(35,35)
This example shows how to interpolate a solution that depends on time.
Solve the equation
on the unit disk with zero Dirichlet conditions and zero initial conditions. Solve at five times from 0 to 1.
g0 = [1;0;0;1]; % circle centered at (0,0) with radius 1 sf = 'C1'; g = decsg(g0,sf,sf'); % decomposed geometry matrix model = createpde; gm = geometryFromEdges(model,g); % Zero Dirichlet conditions applyBoundaryCondition(model,"dirichlet", ... "Edge",(1:gm.NumEdges), ... "u",0); [p,e,t] = initmesh(gm); c = 1; a = 0; f = 1; d = 1; tlist = 0:1/4:1; u = parabolic(0,tlist,model,p,e,t,c,a,f,d);
52 successful steps 0 failed attempts 106 function evaluations 1 partial derivatives 13 LU decompositions 105 solutions of linear systems
Construct an interpolant for the solution.
F = pdeInterpolant(p,t,u);
Interpolate the solution at x = 0.1, y = -0.1, and all available times.
x = 0.1; y = -0.1; uOut = evaluate(F,x,y)
uOut = 1×5
0 0.1809 0.2278 0.2388 0.2413
The solution starts at 0 at time 0, as it should. It grows to about 1/4 at time 1.
This example shows how to interpolate an elliptic solution to a grid.
Define and Solve the Problem
Use the built-in geometry functions to create an L-shaped region with zero Dirichlet boundary conditions. Solve an elliptic PDE with coefficients , , , with zero Dirichlet boundary conditions.
[p,e,t] = initmesh("lshapeg"); % Predefined geometry u = assempde("lshapeb",p,e,t,1,0,1); % Predefined boundary condition
Create an Interpolant
Create an interpolant for the solution.
F = pdeInterpolant(p,t,u);
Create a Grid for the Solution
xgrid = -1:0.1:1; ygrid = -1:0.2:1; [X,Y] = meshgrid(xgrid,ygrid);
The resulting grid has some points that are outside the L-shaped region.
Evaluate the Solution on the Grid
uout = evaluate(F,X,Y);
The interpolated solution uout is a column vector. You can reshape it to match the size of X or Y. This gives a matrix, like the output of the tri2grid function.
Z = reshape(uout,size(X));
Input Arguments
Output Arguments
More About
Algorithms
For each point where a solution is requested (pOut), there are two
steps in the interpolation process. First, the element containing
the point must be located and second, interpolation within that element must be
performed using the element shape functions and the values of the solution at the
element’s node points.
Version History
Introduced in R2014b