accelerate
(Not recommended) Option to accelerate computation of gradient for approximator object based on neural network
Since R2022a
accelerate is not recommended. Use dlaccelerate on
your loss function instead. For more information, see accelerate is not recommended.
Description
newAppx = accelerate(oldAppx,useAcceleration)newAppx, which has the same configuration as the original object,
oldAppx, and the option to accelerate the gradient computation set to
the logical value useAcceleration.
Examples
Accelerate Gradient Computation for a Q-Value Function
Create observation and action specification objects (or
alternatively use getObservationInfo and
getActionInfo to extract the specification objects from an
environment). For this example, define an observation space with two channels. The first
channel carries an observation from a continuous four-dimensional space. The second
carries a discrete scalar observation that can be either zero or one. Finally, the
action space is a three-dimensional vector in a continuous action space.
obsInfo = [rlNumericSpec([4 1])
rlFiniteSetSpec([0 1])];
actInfo = rlNumericSpec([3 1]);To approximate the Q-value function within the critic, create a recurrent deep neural network. The output layer must be a scalar expressing the value of executing the action given the observation.
Define each network path as an array of layer objects. Get the dimensions of the
observation and action spaces from the environment specification objects, and specify a
name for the input layers, so you can later explicitly associate them with the
appropriate environment channel. Since the network is recurrent, use
sequenceInputLayer as the input layer and include an
lstmLayer as one of the other network layers.
% Define paths inPath1 = [ sequenceInputLayer( ... prod(obsInfo(1).Dimension), ... Name="netObsIn1") fullyConnectedLayer(5,Name="infc1") ]; inPath2 = [ sequenceInputLayer( ... prod(obsInfo(2).Dimension), ... Name="netObsIn2") fullyConnectedLayer(5,Name="infc2") ]; inPath3 = [ sequenceInputLayer( ... prod(actInfo(1).Dimension), ... Name="netActIn") fullyConnectedLayer(5,Name="infc3") ]; % Concatenate 3 previous layer outputs along dim 1 jointPath = [ concatenationLayer(1,3,Name="cct") tanhLayer lstmLayer(8,"OutputMode","sequence") fullyConnectedLayer(1,Name="jntfc") ];
Assemble dlnetwork object.
net = dlnetwork; net = addLayers(net,inPath1); net = addLayers(net,inPath2); net = addLayers(net,inPath3); net = addLayers(net,jointPath);
Connect layers.
net = connectLayers(net,"infc1","cct/in1"); net = connectLayers(net,"infc2","cct/in2"); net = connectLayers(net,"infc3","cct/in3");
Plot network.
plot(net)

Initialize network and display the number of weights.
net = initialize(net); summary(net)
Initialized: true
Number of learnables: 832
Inputs:
1 'netObsIn1' Sequence input with 4 dimensions
2 'netObsIn2' Sequence input with 1 dimensions
3 'netActIn' Sequence input with 3 dimensions
Create the critic with rlQValueFunction, using the network, and
the observation and action specification objects.
critic = rlQValueFunction(net, ... obsInfo, ... actInfo, ... ObservationInputNames=["netObsIn1","netObsIn2"], ... ActionInputNames="netActIn");
To return the value of the actions as a function of the current observation, use
getValue or evaluate.
val = evaluate(critic, ... { rand(obsInfo(1).Dimension), ... rand(obsInfo(2).Dimension), ... rand(actInfo(1).Dimension) })
val = 1×1 cell array
{[0.0089]}
When you use evaluate, the result is a single-element cell array
containing the value of the action in the input, given the observation.
val{1}ans = single
0.0089
Calculate the gradients of the sum of the three outputs with respect to the inputs, given a random observation.
gro = gradient(critic,"output-input", ... { rand(obsInfo(1).Dimension) , ... rand(obsInfo(2).Dimension) , ... rand(actInfo(1).Dimension) } )
gro=3×1 cell array
{4×1 single}
{[ -0.0945]}
{3×1 single}
The result is a cell array with as many elements as the number of input channels. Each element contains the derivatives of the sum of the outputs with respect to each component of the input channel. Display the gradient with respect to the element of the second channel.
gro{2}ans = single
-0.0945
Obtain the gradient with respect of five independent sequences, each one made of nine sequential observations.
gro_batch = gradient(critic,"output-input", ... { rand([obsInfo(1).Dimension 5 9]) , ... rand([obsInfo(2).Dimension 5 9]) , ... rand([actInfo(1).Dimension 5 9]) } )
gro_batch=3×1 cell array
{4×1×5×9 single}
{1×1×5×9 single}
{3×1×5×9 single}
Display the derivative of the sum of the outputs with respect to the third observation element of the first input channel, after the seventh sequential observation in the fourth independent batch.
gro_batch{1}(3,1,4,7)ans = single
0.0693
Set the option to accelerate the gradient computations.
critic = accelerate(critic,true);
Calculate the gradients of the sum of the outputs with respect to the parameters, given a random observation.
grp = gradient(critic,"output-parameters", ... { rand(obsInfo(1).Dimension) , ... rand(obsInfo(2).Dimension) , ... rand(actInfo(1).Dimension) } )
grp=11×1 cell array
{ 5×4 single }
{ 5×1 single }
{ 5×1 single }
{ 5×1 single }
{ 5×3 single }
{ 5×1 single }
{32×15 single }
{32×8 single }
{32×1 single }
{[-0.0140 -0.0424 -0.0676 -0.0266 -0.0166 -0.0915 0.0405 0.0315]}
{[ 1]}
Each array within a cell contains the gradient of the sum of the outputs with respect to a group of parameters.
grp_batch = gradient(critic,"output-parameters", ... { rand([obsInfo(1).Dimension 5 9]) , ... rand([obsInfo(2).Dimension 5 9]) , ... rand([actInfo(1).Dimension 5 9]) } )
grp_batch=11×1 cell array
{ 5×4 single }
{ 5×1 single }
{ 5×1 single }
{ 5×1 single }
{ 5×3 single }
{ 5×1 single }
{32×15 single }
{32×8 single }
{32×1 single }
{[-2.0333 -10.3220 -10.6084 -1.2850 -4.4681 -8.0848 9.0716 3.0989]}
{[ 45]}
If you use a batch of inputs, gradient uses the whole input
sequence (in this case nine steps), and all the gradients with respect to the
independent batch dimensions (in this case five) are added together. Therefore, the
returned gradient always has the same size as the output from getLearnableParameters.
Accelerate Gradient Computation for a Discrete Categorical Actor
Create observation and action specification objects (or
alternatively use getObservationInfo and
getActionInfo to extract the specification objects from an
environment). For this example, define an observation space with two channels. The first
channel carries an observation from a continuous four-dimensional space. The second
carries a discrete scalar observation that can be either zero or one. Finally, the
action space consist of a scalar that can be -1,
0, or 1.
obsInfo = [rlNumericSpec([4 1])
rlFiniteSetSpec([0 1])];
actInfo = rlFiniteSetSpec([-1 0 1]);Create a deep neural network to be used as approximation model within the actor. The
output layer must have three elements, each one expressing the value of executing the
corresponding action, given the observation. To create a recurrent neural network, use
sequenceInputLayer as the input layer and include an
lstmLayer as one of the other network layers.
% Define paths inPath1 = [ sequenceInputLayer(prod(obsInfo(1).Dimension)) fullyConnectedLayer(prod(actInfo.Dimension),Name="fc1") ]; inPath2 = [ sequenceInputLayer(prod(obsInfo(2).Dimension)) fullyConnectedLayer(prod(actInfo.Dimension),Name="fc2") ]; % Concatenate previous paths outputs along first dimension jointPath = [ concatenationLayer(1,2,Name="cct") tanhLayer lstmLayer(8,OutputMode="sequence") fullyConnectedLayer( ... prod(numel(actInfo.Elements)), ... Name="jntfc") ]; % Assemble dlnetwork object net = dlnetwork; net = addLayers(net,inPath1); net = addLayers(net,inPath2); net = addLayers(net,jointPath); % Connect layers net = connectLayers(net,"fc1","cct/in1"); net = connectLayers(net,"fc2","cct/in2"); % Plot network plot(net)
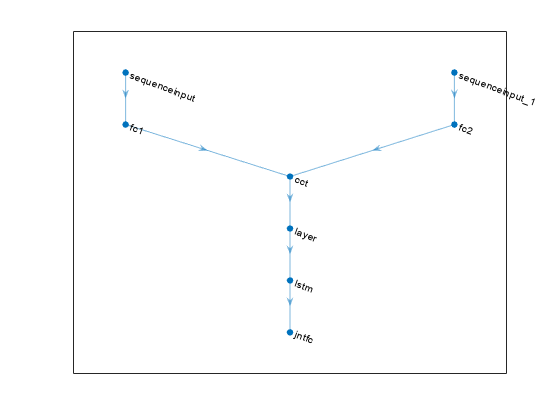
% initialize network and display the number of weights.
net = initialize(net);
summary(net) Initialized: true
Number of learnables: 386
Inputs:
1 'sequenceinput' Sequence input with 4 dimensions
2 'sequenceinput_1' Sequence input with 1 dimensions
Since each element of the output layer must represent the probability of executing
one of the possible actions the software automatically adds a
softmaxLayer as a final output layer if you do not specify it
explicitly.
Create the actor with rlDiscreteCategoricalActor, using the
network and the observations and action specification objects. When the network has
multiple input layers, they are automatically associated with the environment
observation channels according to the dimension specifications in
obsInfo.
actor = rlDiscreteCategoricalActor(net, obsInfo, actInfo);
To return a vector of probabilities for each possible action, use
evaluate.
[prob,state] = evaluate(actor, ... { rand(obsInfo(1).Dimension) , ... rand(obsInfo(2).Dimension) }); prob{1}
ans = 3x1 single column vector
0.3403
0.3114
0.3483
To return an action sampled from the distribution, use
getAction.
act = getAction(actor, ... { rand(obsInfo(1).Dimension) , ... rand(obsInfo(2).Dimension) }); act{1}
ans = 1
Set the option to accelerate the gradient computations.
actor = accelerate(actor,true);
Each array within a cell contains the gradient of the sum of the outputs with respect to a group of parameters.
grp_batch = gradient(actor,"output-parameters", ... { rand([obsInfo(1).Dimension 5 9]) , ... rand([obsInfo(2).Dimension 5 9])} )
grp_batch=9×1 cell array
{[-3.1996e-09 -4.5687e-09 -4.4820e-09 -4.6439e-09]}
{[ -1.1544e-08]}
{[ -1.1321e-08]}
{[ -2.8436e-08]}
{32x2 single }
{32x8 single }
{32x1 single }
{ 3x8 single }
{ 3x1 single }
If you use a batch of inputs, the gradient uses the whole input
sequence (in this case nine steps), and all the gradients with respect to the
independent batch dimensions (in this case five) are added together. Therefore, the
returned gradient always has the same size as the output from getLearnableParameters.
Input Arguments
Output Arguments
Version History
Introduced in R2022aSee Also
Functions
Objects
rlValueFunction|rlQValueFunction|rlVectorQValueFunction|rlContinuousDeterministicActor|rlDiscreteCategoricalActor|rlContinuousGaussianActor|rlContinuousDeterministicTransitionFunction|rlContinuousGaussianTransitionFunction|rlContinuousDeterministicRewardFunction|rlContinuousGaussianRewardFunction|rlIsDoneFunction
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)