Train TD3 Agent for PMSM Control
This example demonstrates speed control of a permanent magnet synchronous motor (PMSM) using a twin delayed deep deterministic policy gradient (TD3) agent.
The goal of this example is to show that you can use reinforcement learning as an alternative to linear controllers, such as PID controllers, to control the speed of PMSM systems. Linear controllers often do not produce good tracking performance outside the region in which the plant can be approximated with a linear system. In such cases, reinforcement learning provides a nonlinear control alternative.
Load the parameters for this example.
sim_data
### The Lq is observed to be lower than Ld. ###
### Using the lower of these two for the Ld (internal variable) ###
### and higher of these two for the Lq (internal variable) for computations. ###
### The Lq is observed to be lower than Ld. ###
### Using the lower of these two for the Ld (internal variable) ###
### and higher of these two for the Lq (internal variable) for computations. ###
model: 'Maxon-645106'
sn: '2295588'
p: 7
Rs: 0.2930
Ld: 8.7678e-05
Lq: 7.7724e-05
Ke: 5.7835
J: 8.3500e-05
B: 7.0095e-05
I_rated: 7.2600
QEPSlits: 4096
N_base: 3476
N_max: 4300
FluxPM: 0.0046
T_rated: 0.3471
PositionOffset: 0.1650
model: 'BoostXL-DRV8305'
sn: 'INV_XXXX'
V_dc: 24
I_trip: 10
Rds_on: 0.0020
Rshunt: 0.0070
CtSensAOffset: 2295
CtSensBOffset: 2286
CtSensCOffset: 2295
ADCGain: 1
EnableLogic: 1
invertingAmp: 1
ISenseVref: 3.3000
ISenseVoltPerAmp: 0.0700
ISenseMax: 21.4286
R_board: 0.0043
CtSensOffsetMax: 2500
CtSensOffsetMin: 1500
model: 'LAUNCHXL-F28379D'
sn: '123456'
CPU_frequency: 200000000
PWM_frequency: 5000
PWM_Counter_Period: 20000
ADC_Vref: 3
ADC_MaxCount: 4095
SCI_baud_rate: 12000000
V_base: 13.8564
I_base: 21.4286
N_base: 3476
P_base: 445.3845
T_base: 1.0249
Open the Simulink® model.
mdl = "mcb_pmsm_foc_sim_RL";
open_system(mdl)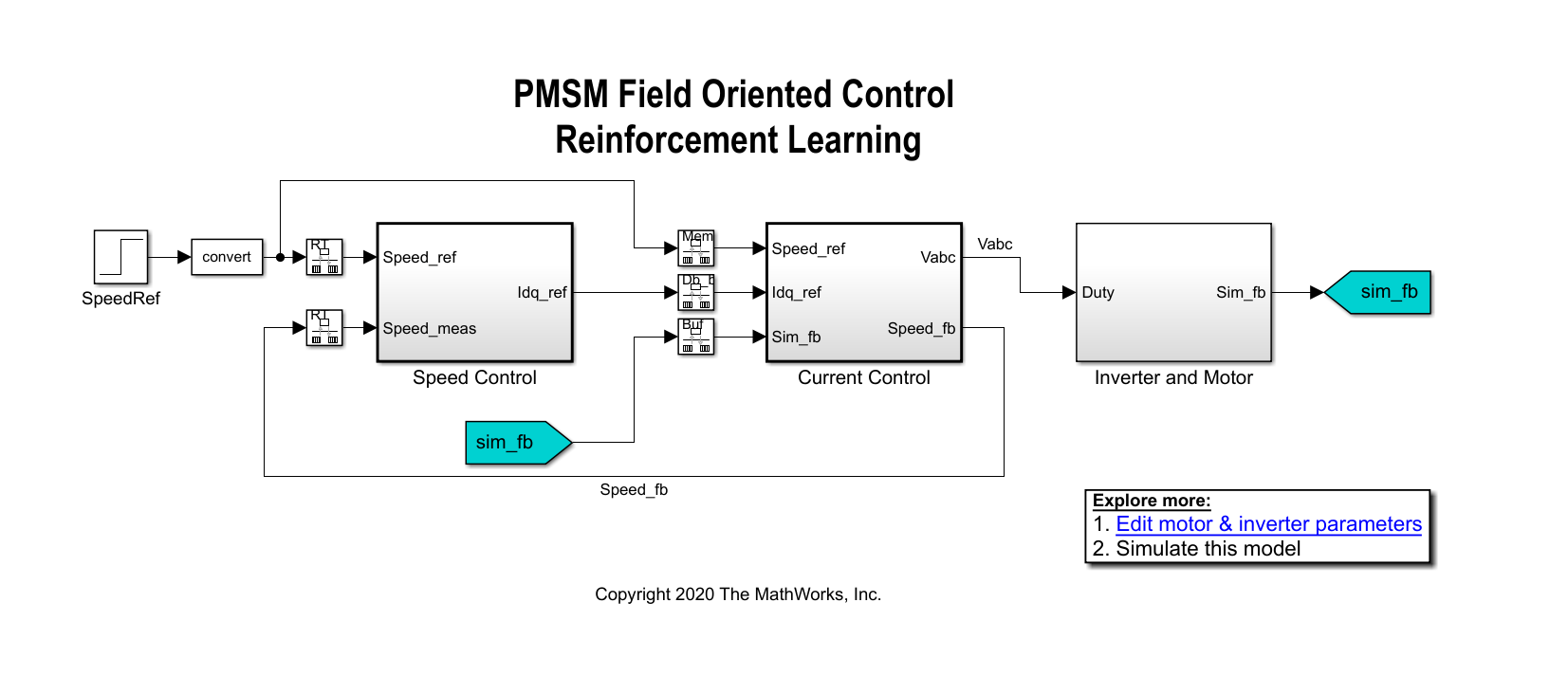
In a linear control version of this example, you can use PI controllers in both the speed and current control loops. An outer-loop PI controller can control the speed while two inner-loop PI controllers control the d-axis and q-axis currents. The overall goal is to track the reference speed in the Speed_Ref signal. This example uses a reinforcement learning agent to control the currents in the inner control loop while a PI controller controls the outer loop.
Create Environment Object
The environment in this example consists of the PMSM system, excluding the inner-loop current controller, which is the reinforcement learning agent. To view the interface between the reinforcement learning agent and the environment, open the Closed Loop Control subsystem.
open_system(mdl + ... "/Current Control/Control_System/Closed Loop Control")
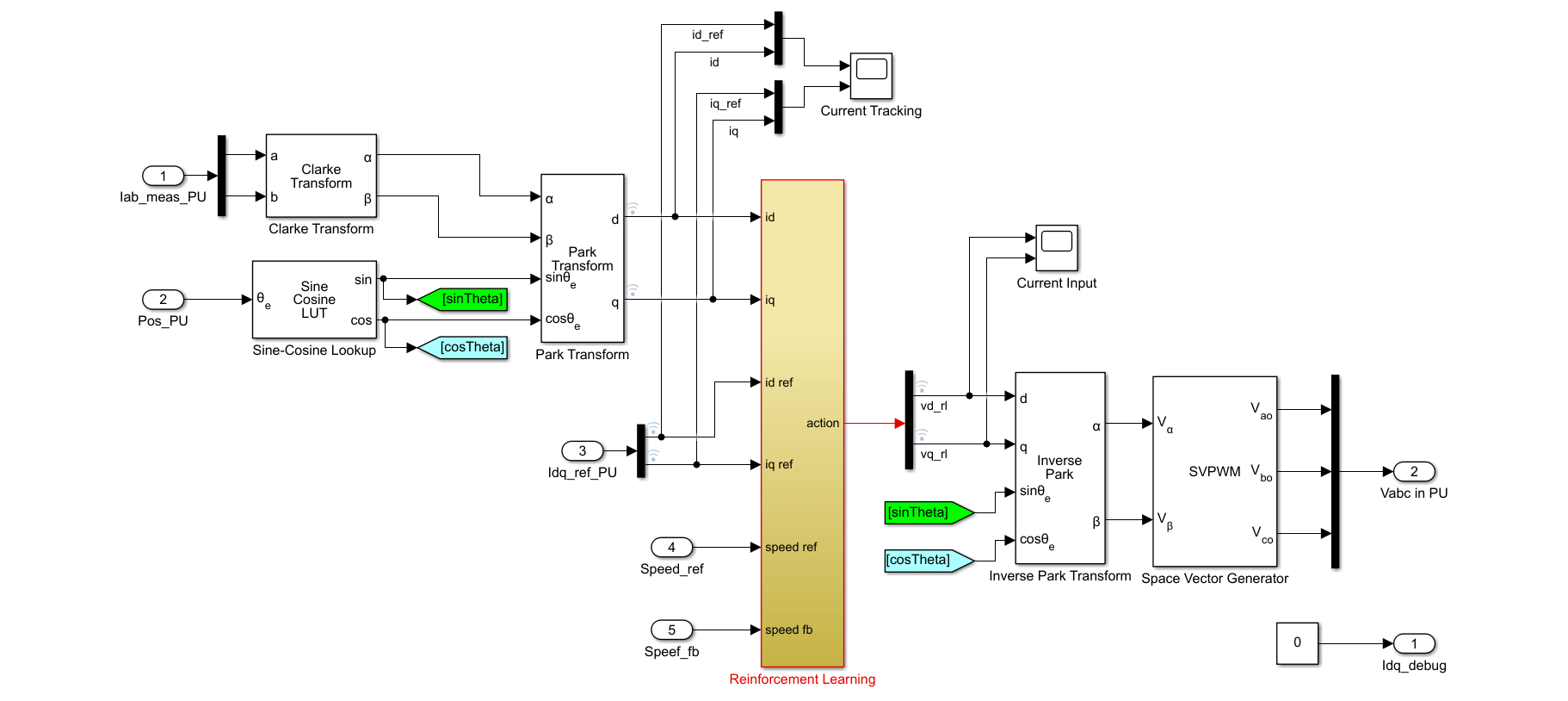
The Reinforcement Learning subsystem contains an RL Agent block, the creation of the observation vector, and the reward calculation.
For this environment:
The observations are the outer-loop reference speed
Speed_ref, speed feedbackSpeed_fb, d-axis and q-axis currents and errors (, , and ), and the error integrals.The actions from the agent are the voltages
vd_rlandvq_rl.The sample time of the agent is 2e-4 seconds. The inner-loop control occurs at a different sample time than the outer loop control.
The simulation runs for 5000 time steps unless it is terminated early when the signal is saturated at 1.
The reward at each time step is:
.
Here, , and are constants, is the d-axis current error, is the q-axis current error, are the actions from the previous time step, and is a flag that is equal to 1 when the simulation is terminated early.
Create the observation and action specifications for the environment. For information on creating continuous specifications, see rlNumericSpec.
% Create observation specifications. numObs = 8; obsInfo = rlNumericSpec( ... [numObs 1], ... DataType=dataType); obsInfo.Name = "observations"; obsInfo.Description = "Error and reference signal"; % Create action specifications. numAct = 2; actInfo = rlNumericSpec([numAct 1], "DataType", dataType); actInfo.Name = "vqdRef";
Create the Simulink environment object using the observation and action specifications. For more information on creating Simulink environments, see rlSimulinkEnv.
agentblk = "mcb_pmsm_foc_sim_RL/Current Control/" + ... "Control_System/Closed Loop Control/" + ... "Reinforcement Learning/RL Agent"; env = rlSimulinkEnv(mdl, agentblk, obsInfo, actInfo);
Provide a reset function for this environment using the ResetFcn environment property. The sim function calls the reset function at the start of each simulation episode, and the train function calls it at the start of each training episode. The reset function takes as input, and returns as output, a Simulink.SimulationInput (Simulink) object. The output object specifies temporary changes applied to model, which are then discarded when the simulation or training completes. For this example, the resetPMSM function randomly initializes the final value of the reference speed in the SpeedRef block to 695.4 rpm (0.2 pu), 1390.8 rpm (0.4 pu), 2086.2 rpm (0.6 pu), or 2781.6 rpm (0.8 pu), and their corresponding negative values. For more information, see Reset Function for Simulink Environments.
env.ResetFcn = @resetPMSM;
Create Agent
The agent used in this example is a twin-delayed deep deterministic policy gradient (TD3) agent. TD3 agents use two parameterized Q-value function approximators to estimate the value (that is, the expected cumulative long-term reward) of the policy.
To model the parameterized Q-value function within both critics, use a neural network with two inputs (the observation and action) and one output (the value of the policy when taking a given action from the state corresponding to a given observation). For more information on TD3 agents, see Twin-Delayed Deep Deterministic (TD3) Policy Gradient Agent.
The actor and critic networks are initialized randomly. Ensure reproducibility of the section by fixing the seed of the random generator.
rng(0)
Define each network path as an array of layer objects. Assign names to the input and output layers of each path. These names allow you to connect the paths and then later explicitly associate the network input and output layers with the appropriate environment channel.
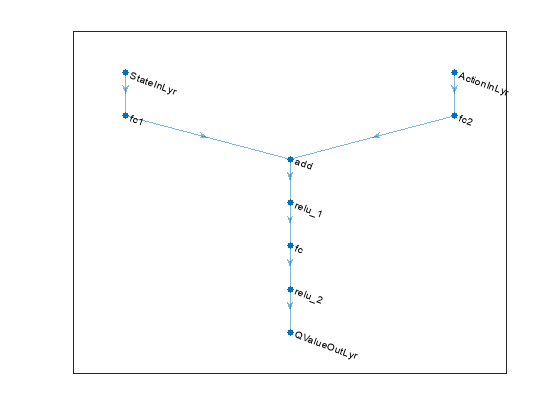
% State input path statePath = [ featureInputLayer(numObs, Name="StateInLyr") fullyConnectedLayer(128, Name="fc1") ]; % Action input path actionPath = [ featureInputLayer(numAct, Name="ActionInLyr") fullyConnectedLayer(128, Name="fc2") ]; % Common output path commonPath = [ additionLayer(2, Name="add") reluLayer fullyConnectedLayer(128) reluLayer fullyConnectedLayer(1, Name="QValueOutLyr") ]; % Create dlnetwork object and add layers. criticNet = dlnetwork(); criticNet = addLayers(criticNet, statePath); criticNet = addLayers(criticNet, actionPath); criticNet = addLayers(criticNet, commonPath); % Connect layers. criticNet = connectLayers(criticNet, "fc1", "add/in1"); criticNet = connectLayers(criticNet, "fc2", "add/in2");
Plot the critic network structure.
plot(criticNet);
Display the number of weights.
summary(initialize(criticNet));
Initialized: true
Number of learnables: 18.2k
Inputs:
1 'StateInLyr' 8 features
2 'ActionInLyr' 2 features
Create the critic objects using rlQValueFunction. The critics are function approximator objects that use the deep neural network as approximation model. To make sure the critics have different initial weights, explicitly initialize each network before using them to create a critic.
critic1 = rlQValueFunction(initialize(criticNet),obsInfo,actInfo); critic2 = rlQValueFunction(initialize(criticNet),obsInfo,actInfo);
TD3 agents use a parameterized deterministic policy over continuous action spaces, which is learned by a continuous deterministic actor. This actor takes the current observation as input and returns as output an action that is a deterministic function of the observation.
To model the parameterized policy within the actor, use a neural network with one input layer (which receives the content of the environment observation channel, as specified by obsInfo) and one output layer (which returns the action to the environment action channel, as specified by actInfo). For more information on creating approximator objects such as actors and critics, see Create Actors, Critics, and Policy Objects.
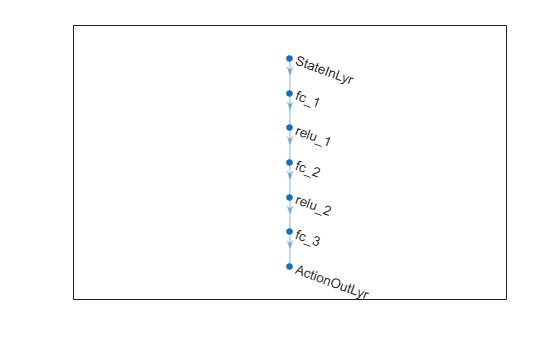
Define the network as an array of layer objects.
actorNet = [
featureInputLayer(numObs, Name="StateInLyr")
fullyConnectedLayer(128)
reluLayer
fullyConnectedLayer(128)
reluLayer
fullyConnectedLayer(numAct)
tanhLayer(Name="ActionOutLyr")
];Convert to dlnetwork object.
actorNet = dlnetwork(actorNet);
Plot the actor network.
plot(actorNet);
Initialize network and display the number of weights.
actorNet = initialize(actorNet); summary(actorNet)
Initialized: true
Number of learnables: 17.9k
Inputs:
1 'StateInLyr' 8 features
Create the actor using rlContinuousDeterministicActor, passing the actor network and the environment specifications as input arguments.
actor = rlContinuousDeterministicActor(actorNet,obsInfo,actInfo);
To create the TD3 agent, first specify the agent options using an rlTD3AgentOptions object. Alternatively, you can create the agent first, and then access its option object and modify all the options using dot notation.
The agent trains from an experience buffer of maximum capacity 2e6 by randomly selecting mini-batches of size 512. Use a discount factor of 0.995 to favor long-term rewards. TD3 agents maintain time-delayed copies of the actor and critics known as the target actor and critics.
Ts_agent = Ts; agentOpts = rlTD3AgentOptions( ... SampleTime=Ts_agent, ... DiscountFactor=0.995, ... ExperienceBufferLength=2e6, ... MiniBatchSize=512);
Specify training options for the critics and the actor using rlOptimizerOptions. For this example, set a learning rate of 1e-3 for the actor and critics respectively.
% Critic optimizer options for idx = 1:2 agentOpts.CriticOptimizerOptions(idx).LearnRate = 1e-3; agentOpts.CriticOptimizerOptions(idx).GradientThreshold = 1; agentOpts.CriticOptimizerOptions(idx).L2RegularizationFactor = 1e-3; end % Actor optimizer options agentOpts.ActorOptimizerOptions.LearnRate = 1e-3; agentOpts.ActorOptimizerOptions.GradientThreshold = 1; agentOpts.ActorOptimizerOptions.L2RegularizationFactor = 1e-3;
During training, the agent explores the action space using a Gaussian action noise model. Set the noise standard deviation using the ExplorationModel property. For more information on the noise model, see rlTD3AgentOptions.
agentOpts.ExplorationModel.StandardDeviationMin = 0.05; agentOpts.ExplorationModel.StandardDeviation = 0.05;
The agent also uses a Gaussian action noise model for smoothing the target policy updates. Specify the noise standard deviation for this model using the TargetPolicySmoothModel property.
agentOpts.TargetPolicySmoothModel.StandardDeviation = 0.1;
The LearningFrequency is set to 100 and MaxMiniBatchPerEpoch is set to 10, where LearningFrequency controls how often the agent updates from collected samples and MaxMiniBatchPerEpoch limits the number of gradient steps per epoch to balance training time and sample collection.
agentOpts.LearningFrequency = 100; agentOpts.MaxMiniBatchPerEpoch = 10;
Create the agent using the specified actor, critics, and options.
agent = rlTD3Agent(actor, [critic1,critic2], agentOpts);
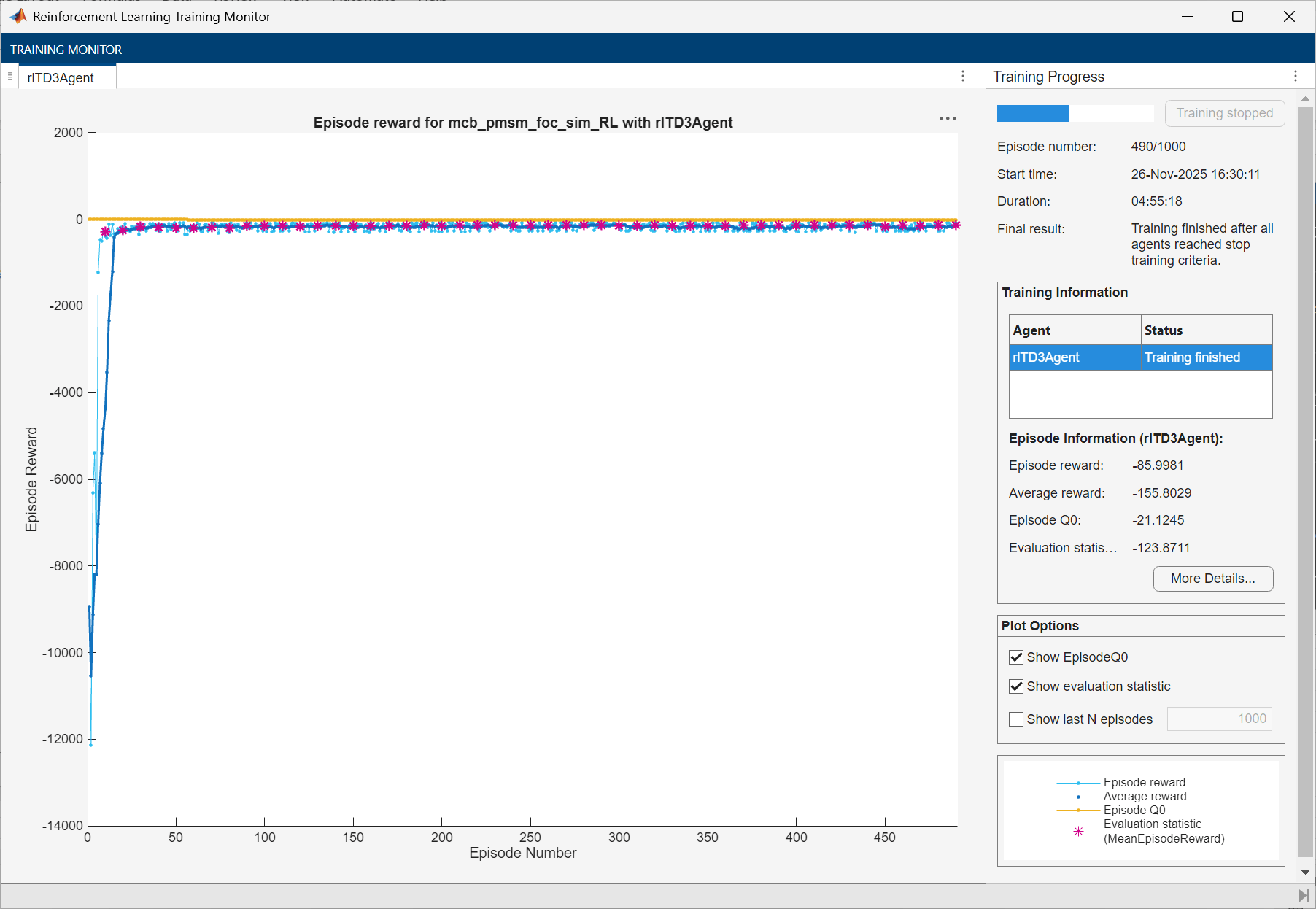
Train Agent
To train the agent, first specify the training options using rlTrainingOptions. For this example, use the following options.
Run each training for a maximum of 1000 episodes, with each episode lasting at most
ceil(T/Ts_agent)time steps.Stop the training when the agent evaluation receives a mean cumulative reward greater than -125. At this point, the agent can track the reference speeds.
T = 0.5; maxepisodes = 1000; maxsteps = ceil(T/Ts_agent); trainOpts = rlTrainingOptions( ... MaxEpisodes=maxepisodes, ... MaxStepsPerEpisode=maxsteps, ... StopTrainingCriteria="EvaluationStatistic", ... StopTrainingValue=-125, ... ScoreAveragingWindowLength=10);
To evaluate the agent during training, create an rlEvaluator object. Configure the evaluator to run 3 consecutive evaluation episodes every 10 training episodes.
evaluator = rlEvaluator( ... NumEpisodes=3, ... EvaluationFrequency=10, ... RandomSeeds=[1 2 3]);
Train the agent using the train function. Training this agent is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining = false; if doTraining trainResult = train(agent, env, trainOpts, Evaluator=evaluator); else load("rlPMSMAgent.mat","agent") end
A snapshot of the training progress is shown in the following figure. You can expect different results due to randomness in the training process.
Simulate Agent
Fix the random number stream for reproducibility.
rng(0,"twister");By default, the agent uses a greedy (hence deterministic) policy in simulation. To use the exploratory policy instead, set the UseExplorationPolicy agent property to true.
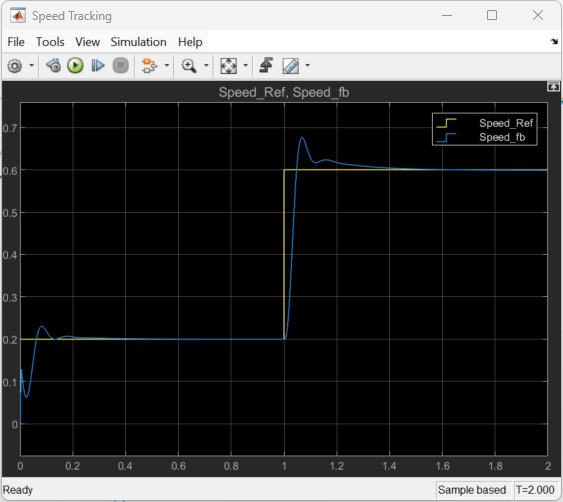
To validate the performance of the trained agent, simulate the model and view the closed-loop performance through the Speed Tracking Scope block. Use a Simulink.SimulationInput (Simulink) object to temporarily modify block parameters and simulate the model.
in = Simulink.SimulationInput(mdl); sim(in);
You can also simulate the model at different reference speeds. Set the reference speed in the SpeedRef block to a different value between 0.2 and 1.0 per-unit and simulate the model again.
in = setBlockParameter(in,"mcb_pmsm_foc_sim_RL/SpeedRef","After", "0.6"); sim(in);


The following figure shows an example of closed-loop tracking performance. In this simulation, the reference speed steps through values of 695.4 rpm (0.2 per-unit) and 1738.5 rpm (0.5 pu). The PI and reinforcement learning controllers track the reference signal changes within 0.5 seconds.
Although the agent was trained to track the reference speed of 0.2 per-unit and not 0.5 per-unit, it was able to generalize well.
The following figure shows the corresponding current tracking performance. The agent was able to track the and current references with small steady-state error.

See Also
Functions
Objects
Blocks
Topics
- Tune Single PI Controller Gains For Multiple Operating Points Using Reinforcement Learning
- Field-Oriented Control of PMSM Using Reinforcement Learning (Motor Control Blockset)
- Train Biped Robot to Walk Using Reinforcement Learning Agents
- Twin-Delayed Deep Deterministic (TD3) Policy Gradient Agent
- Train Reinforcement Learning Agents