rncf
Right normalized coprime factorization
Description
fact = rncf(sys)sys. The factorization is given by:
Here, denotes the conjugate of Mr (see
ctranspose).
The returned model fact is a minimal state-space realization of the
stable system
[Mr;Nr].
This factorization is used in other normalized coprime factor computations such as model
reduction (reducespec)
and controller synthesis (ncfsyn).
Examples
Compute the right normalized coprime factorization of a SISO system.
sys = zpk([1 -1+2i -1-2i],[-1 2+1i 2-1i],1); [fact,Mr,Nr] = rncf(sys);
Examine the original system and its factors.
sys
sys = (s-1) (s^2 + 2s + 5) -------------------- (s+1) (s^2 - 4s + 5) Continuous-time zero/pole/gain model. Model Properties
zpk(Mr)
ans =
0.70711 (s+1) (s^2 - 4s + 5)
----------------------------
(s+1) (s^2 + 3.162s + 5)
Continuous-time zero/pole/gain model.
Model Properties
zpk(Nr)
ans =
0.70711 (s-1) (s^2 + 2s + 5)
----------------------------
(s+1) (s^2 + 3.162s + 5)
Continuous-time zero/pole/gain model.
Model Properties
The numerators of the factors Mr and Nr are the denominator and numerator of sys, respectively. Thus, sys = Nr/Mr. rncf chooses the denominators of the factors such that the system is a unit vector at all frequencies. To confirm that property of the factorization, examine the singular values of fact, which is a stable minimal realization of .
sigma(fact)
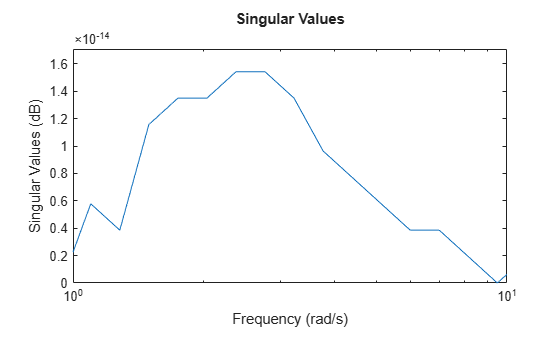
Within a small numerical error, the singular value of fact is 1 (0 dB) at all frequencies.
Compute the right normalized coprime factorization of a state-space model that has two outputs, two inputs, and three states.
rng(0); % for reproducibility
sys = rss(3,2,2);
[fact,Mr,Nr] = rncf(sys);fact is a stable minimal realization of the factorization given by [Mr;Nr].
isstable(fact)
ans = logical
1
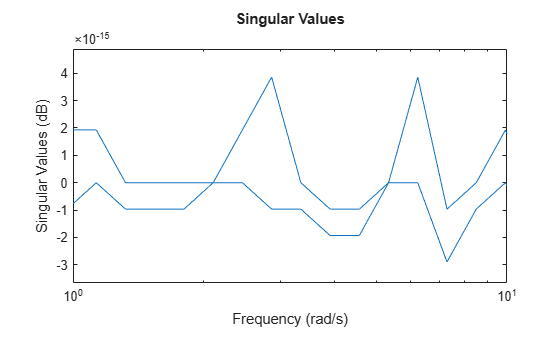
Another property of fact is that its frequency response F(jω) is an orthogonal matrix at all frequencies (F(jω)'F(jω) = I). Confirm this property by examining the singular values of fact. Within a small numerical error, the singular values are 1 (0 dB) at all frequencies.
sigma(fact)
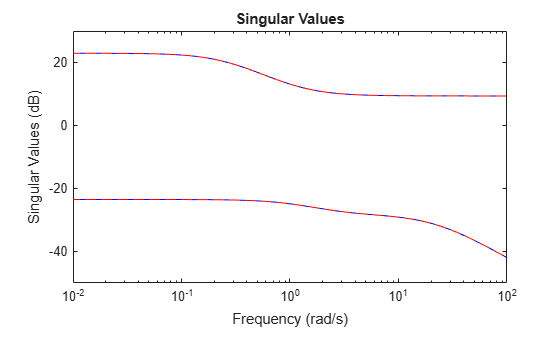
Confirm that the factors satisfy sys = Nr/Mr by examining the singular values of both.
sigma(sys,'b-',Nr/Mr,'r--')
Input Arguments
Output Arguments
Tips
factis a minimal realization of[Mr;Nr]. If you need to use[Mr;Nr]or[Mr;Nr]'in a computation, it is better to usefactthan to concatenate the factors yourself. Such manual concatenation results in extra (nonminimal) states, which can lead to decreased numerical accuracy.
Version History
Introduced in R2019a
See Also
lncf | reducespec | ncfsyn