ncfsyn
Loop shaping design using Glover-McFarlane method
Syntax
Description
ncfsyn implements a method for designing controllers that
uses a combination of loop shaping and robust stabilization as proposed in [1]-[2]. The function computes the Glover-McFarlane H∞
normalized coprime factor loop-shaping controller K for a plant
G with pre-compensator and post-compensator weights
W1 and
W2. The function assumes the positive feedback
configuration of the following illustration.
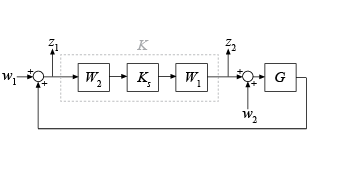
To specify negative feedback, replace G by –G. The
controller Ks stabilizes a family of systems given
by a ball of uncertainty in the normalized coprime factors of the shaped plant Gs =
W2GW1. The final controller K returned by
ncfsyn is obtained as K =
W1KsW2.
[
computes the Glover-McFarlane H∞ normalized
coprime factor loop-shaping controller K,CL,gamma,info] = ncfsyn(G)K for the plant
G, with W1 =
W2 = I. CL is the closed-loop system from the disturbances
w1 and
w2 to the outputs
z1 and
z2. The function also returns the
H∞ performance gamma, and a
structure containing additional information about the result.
Examples
Use ncfsyn to design a controller for the following plant.
G = tf([1 5],[1 2 10]);
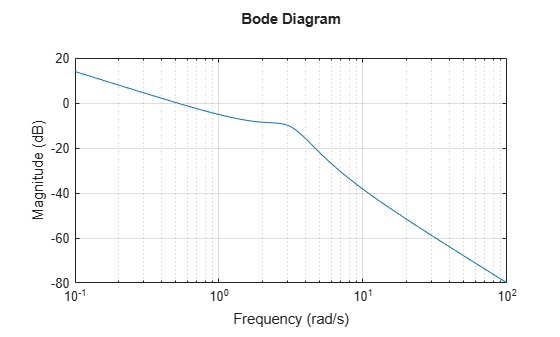
Use weighting functions that yield a shaped plant W1*G*W2 with high gain for disturbance attenuation below 0.1 rad/s, and low gain for good robust stability above about 5 rad/s. For this G, a pre-compensator weight alone is sufficient.
W1 = tf(1,[1 0]); bodemag(W1*G) grid
Compute the controller.
[K,CL,gamma,info] = ncfsyn(G,W1);
The optimal cost gamma is related to the normalized coprime stability margin of the system by 1/gamma = ncfmargin(Gs,-Ks). (The minus sign is needed because ncfmargin assumes a negative-feedback loop, while ncfsyn computes a positive-feedback controller.)
b = ncfmargin(info.Gs,-info.Ks); [gamma 1/b]
ans = 1×2
1.4521 1.4521
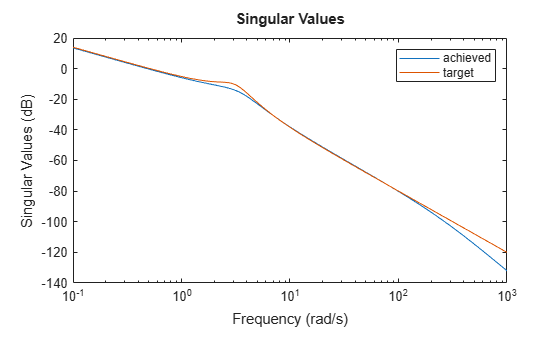
Compare the achieved and target loop shapes.
sigma(G*K,G*W1) legend('achieved','target')
In the controller returned by ncfsyn, some controller poles can become infinitely fast as the actual performance gamma approaches the optimal achievable performance gopt. To prevent this, check the controller poles and increase the tol argument if some poles are undesirably fast. tol sets how closely gamma of the synthesized controller approximates gopt.
Load G, a fourth-order plant.
load("ncfsynTolPlant.mat")
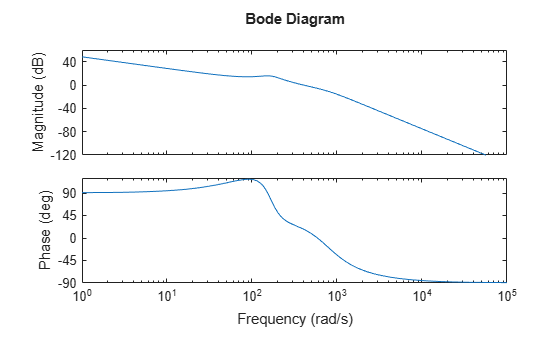
bode(G)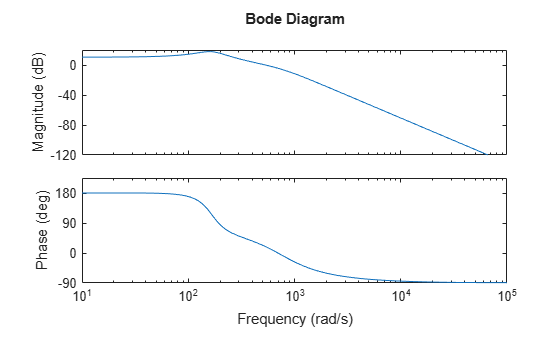
Use a weighting function that yields a shaped plant W1*G with high gain for disturbance attenuation below about 10 rad/s, and low gain for good robust stability above about 1000 rad/s.
W1 = zpk(-130,0,0.6); bode(W1*G)
Design a controller using the default tolerance, tol = 1e-3. Examine the poles of the resulting controller.
[K1,~,gamma1,info1] = ncfsyn(G,W1); damp(K1)
Pole Damping Frequency Time Constant
(rad/seconds) (seconds)
0.00e+00 -1.00e+00 0.00e+00 Inf
-1.48e+02 + 1.60e+01i 9.94e-01 1.49e+02 6.76e-03
-1.48e+02 - 1.60e+01i 9.94e-01 1.49e+02 6.76e-03
-7.90e+02 + 8.01e+02i 7.02e-01 1.13e+03 1.27e-03
-7.90e+02 - 8.01e+02i 7.02e-01 1.13e+03 1.27e-03
-1.50e+05 1.00e+00 1.50e+05 6.66e-06
This controller has a pole at around 150000 rad/s, much faster than any other dynamics in the controller. To reduce the frequency of this pole, try increasing the tolerance to 0.1.
tol = 0.1; [K2,~,gamma2,info2] = ncfsyn(G,W1,[],tol); damp(K2)
Pole Damping Frequency Time Constant
(rad/seconds) (seconds)
0.00e+00 -1.00e+00 0.00e+00 Inf
-1.50e+02 + 6.85e+00i 9.99e-01 1.50e+02 6.68e-03
-1.50e+02 - 6.85e+00i 9.99e-01 1.50e+02 6.68e-03
-6.58e+02 + 9.45e+02i 5.71e-01 1.15e+03 1.52e-03
-6.58e+02 - 9.45e+02i 5.71e-01 1.15e+03 1.52e-03
-1.77e+03 1.00e+00 1.77e+03 5.65e-04
This time the highest-frequency pole is closer to the others. Compare the resulting performance values to confirm that the two controllers deliver similar performance.
gamma1, gamma2
gamma1 = 2.1157
gamma2 = 2.3250
Input Arguments
Output Arguments
Tips
While
ncfmarginassumes a negative-feedback loop, thencfsyncommand designs a controller for a positive-feedback loop. Therefore, to compute the margin using a controller designed withncfsyn, use[marg,freq] = ncfmargin(G,K,+1).
Algorithms
The returned controller K = W1KsW2, where Ks is an optimal H∞ controller that minimizes the H∞ cost
The optimal performance is the minimal cost
Suppose that Gs=NM–1, where N(jω)*N(jω) + M(jω)*M(jω) = I, is a normalized coprime factorization (NCF) of the weighted plant model Gs. Then, theory ensures that the control system remains robustly stable for any perturbation to Gs of the form
where Δ1, Δ2 are a stable pair satisfying
The closed-loop H∞-norm objective has the standard signal gain interpretation. Finally it can be shown that the controller, Ks, does not substantially affect the loop shape in frequencies where the gain of W2GW1 is either high or low, and will guarantee satisfactory stability margins in the frequency region of gain cross-over. In the regulator set-up, the final controller to be implemented is K=W1KsW2.
References
[1] McFarlane, Duncan C., and Keith Glover, eds. Robust Controller Design using Normalized Coprime Factor Plant Descriptions. Vol. 138. Lecture Notes in Control and Information Sciences. Berlin/Heidelberg: Springer-Verlag, 1990. https://doi.org/10.1007/BFb0043199.
[2] McFarlane, D., and K. Glover, “A Loop Shaping Design Procedure using H∞ Synthesis,” IEEE Transactions on Automatic Control, no. 6 (June 1992): pp. 759–69. https://doi.org/10.1109/9.256330.
[3] Vinnicombe, Glenn. “Measuring Robustness of Feedback Systems.” PhD Dissertation, University of Cambridge, 1992.
[4] Zhou, Kemin, and John Comstock Doyle. Essentials of Robust Control. Upper Saddle River, NJ: Prentice-Hall, 1998.