bilinear
Bilinear transformation method for analog-to-digital filter conversion
Syntax
Description
Use this function to convert a continuous-time transfer function to a discrete-time equivalent.
Examples
Design the prototype for a 10th-order Chebyshev type I filter with 6 dB of ripple in the passband. Convert the prototype to state-space form.
[z,p,k] = cheb1ap(10,6); [A,B,C,D] = zp2ss(z,p,k);
Transform the prototype to a bandpass filter such that the equivalent digital filter has a passband with edges at 100 Hz and 500 Hz when sampled at a rate . For the transformation, specify prewarped band edges and in rad/s, a center frequency , and a bandwidth .
fs = 2e3; f1 = 100; u1 = 2*fs*tan(f1*(2*pi/fs)/2); f2 = 500; u2 = 2*fs*tan(f2*(2*pi/fs)/2); [At,Bt,Ct,Dt] = lp2bp(A,B,C,D,sqrt(u1*u2),u2-u1);
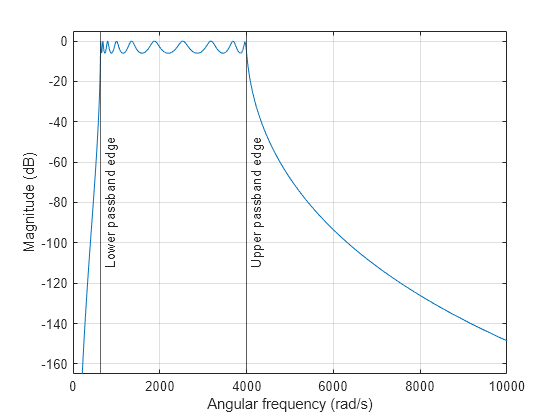
Compute the frequency response of the analog filter using freqs. Plot the magnitude response and the prewarped frequency band edges.
[b,a] = ss2tf(At,Bt,Ct,Dt); [h,w] = freqs(b,a,2048); plot(w,mag2db(abs(h))) xline([u1 u2],"-",["Lower" "Upper"]+" passband edge", ... LabelVerticalAlignment="middle") ylim([-165 5]) xlabel("Angular frequency (rad/s)") ylabel("Magnitude (dB)") grid
Use the bilinear function to create a digital bandpass filter with sample rate .
[Ad,Bd,Cd,Dd] = bilinear(At,Bt,Ct,Dt,fs);
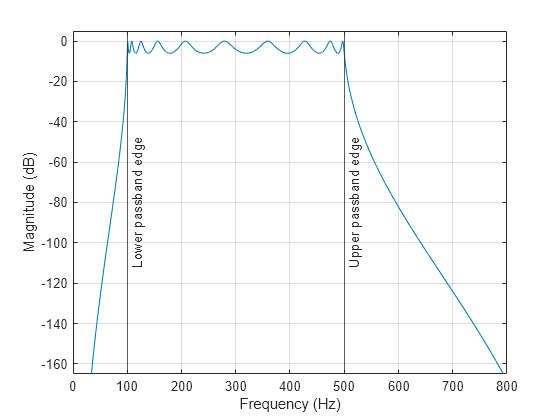
Convert the digital filter from state-space form to second-order sections and compute the frequency response using freqz. Plot the magnitude response and the passband edges.
[hd,fd] = freqz(ss2sos(Ad,Bd,Cd,Dd),2048,fs); plot(fd,mag2db(abs(hd))) xline([f1 f2],"-",["Lower" "Upper"]+" passband edge", ... LabelVerticalAlignment="middle") ylim([-165 5]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)") grid
Design a 6th-order elliptic analog lowpass filter with 5 dB of ripple in the passband, a stopband attenuation of 90 dB, and a cutoff frequency .
fc = 20;
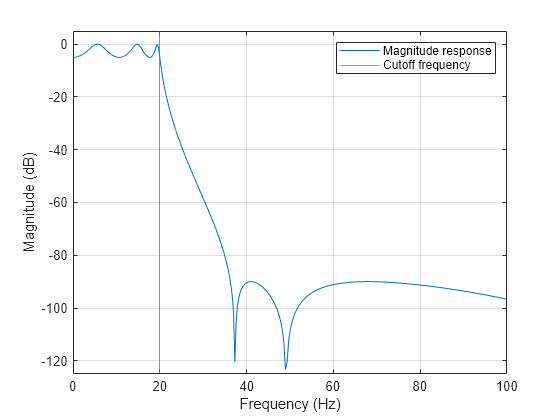
[z,p,k] = ellip(6,5,90,2*pi*fc,"s");Visualize the magnitude response of the analog elliptic filter. Display the cutoff frequency.
[num,den] = zp2tf(z,p,k); [h,w] = freqs(num,den,1024); plot(w/(2*pi),mag2db(abs(h))) xline(fc,Color=[0.8500 0.3250 0.0980]) axis([0 100 -125 5]) grid legend(["Magnitude response" "Cutoff frequency"]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)")
Use the bilinear function to transform the analog filter to a discrete-time IIR filter. Specify a sample rate and a prewarping match frequency .
fs = 200; fp = 20; [zd,pd,kd] = bilinear(z,p,k,fs,fp);
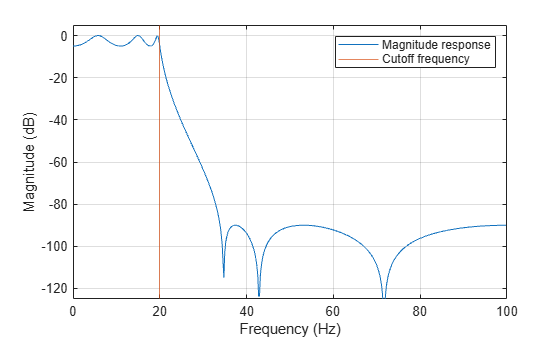
Visualize the magnitude response of the discrete-time filter. Display the cutoff frequency.
[hd,fd] = freqz(zp2sos(zd,pd,kd),[],fs); plot(fd,mag2db(abs(hd))) xline(fc,Color=[0.8500 0.3250 0.0980]) axis([0 100 -125 5]) grid legend(["Magnitude response" "Cutoff frequency"]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)")
Input Arguments
Output Arguments
Algorithms
References
[1] Al-Saggaf, Ubaid M., and Gene F. Franklin. “Model Reduction via Balanced Realizations: An Extension and Frequency Weighting Techniques.” IEEE Transactions on Automatic Control 33, no. 7 (July 1988): 687–92. https://doi.org/10.1109/9.1280.
[2] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice Hall, 1999.
[3] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
[4] Tustin, Arnold. “A Method of Analysing the Behaviour of Linear Systems in Terms of Time Series.” Journal of the Institution of Electrical Engineers - Part IIA: Automatic Regulators and Servo Mechanisms 94, no. 1 (May 1947): 130–42. https://doi.org/10.1049/ji-2a.1947.0020.
Extended Capabilities
Version History
Introduced before R2006a