buttap
Butterworth analog lowpass filter prototype
Syntax
Description
Examples
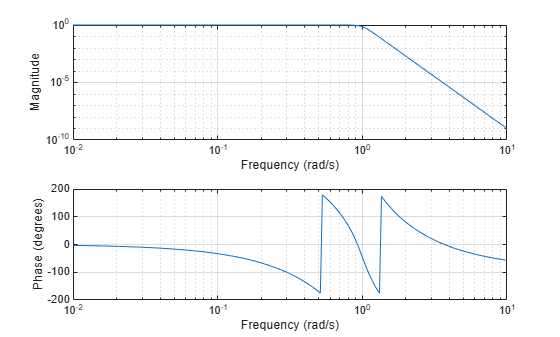
Design a 9th-order Butterworth analog lowpass filter. Display its magnitude and phase responses.
[z,p,k] = buttap(9); % Butterworth filter prototype [num,den] = zp2tf(z,p,k); % Convert to transfer function form freqs(num,den) % Frequency response of analog filter
Input Arguments
Output Arguments
Algorithms
The function buttap returns the poles in the
length n column vector p and the gain in
scalar k. z is an empty matrix because there are no
zeros. The transfer function is
z = []; p = exp(sqrt(-1)*(pi*(1:2:2*n-1)/(2*n)+pi/2)).'; k = real(prod(-p));
Note
The function buttap returns zeros, poles, and gain (z, p,
and k) in MATLAB®. However, the generated C/C++ code for buttap returns only
poles p and gain k since zeros z is
always an empty matrix.
Butterworth filters are characterized by a magnitude response that is maximally flat in
the passband and monotonic overall. In the lowpass case, the first 2n-1
derivatives of the squared magnitude response are zero at ω = 0. The squared
magnitude response function is
corresponding to a transfer function with poles equally spaced around a circle in the left
half plane. The magnitude response at the cutoff angular frequency ω0
is always regardless of the filter order. buttap sets
ω0 to 1 for a normalized result.
References
[1] Parks, T. W., and C. S. Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
Extended Capabilities
Version History
Introduced before R2006a