Simulink.SubSystem.convertToModelReference
Convert subsystems to models
Syntax
Description
Simulink.SubSystem.convertToModelReference(
opens the Model Reference Conversion Advisor for the
subsystem specified by blk,UseConversionAdvisor=true)blk.
Before you use this function, load the model that contains the subsystem.
[
converts one or more subsystems specified by t,h]
= Simulink.SubSystem.convertToModelReference(blks,mdls)blks to models with
names specified by mdls.
For each subsystem that the function converts, the function:
Creates a model.
Copies the contents of the subsystem into the new model.
Updates the root-level input and output blocks of the new model to use the compiled attributes from the original subsystem.
Copies the configuration set of the parent model to the new model or references the same configuration set as the parent model. To support using the new model as a referenced model, the conversion overrides incompatible parameter values in a referenced configuration set (since R2026a) or changes incompatible parameter values in a copied configuration set.
When applicable, the function also:
Copies the model workspace contents used by the subsystem from the parent model to the new model.
Applies the data dictionary used by the parent model to the new model.
Creates the
Simulink.Busobjects,Simulink.Signalobjects, and tunable parameters that the new model requires.Creates a system mask for the new model based on the block mask of the original Subsystem block. System masks do not support some of the functionalities of block masks, such as mask initialization code. For more information, see Introduction to System Mask.
Copies the requirements links created with Requirements Toolbox™ software from the original Subsystem block to the new Model block.
Examples
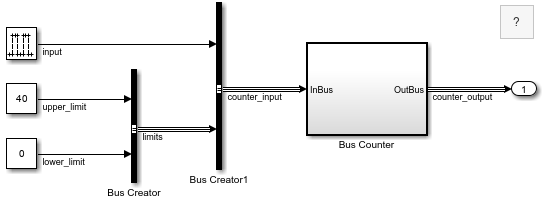
Open and compile the model named sldemo_mdlref_conversion. For the conversion to succeed, the model that contains the subsystem must compile successfully.
mdl = "sldemo_mdlref_conversion"; open_system(mdl); set_param(mdl,SimulationCommand="Update")

The model compiles without warnings or errors.
Open the Model Reference Conversion Advisor for the Subsystem block named Bus Counter.
blk = "sldemo_mdlref_conversion/Bus Counter"; Simulink.SubSystem.convertToModelReference(blk,... UseConversionAdvisor=true);
Updating Model Advisor cache... Model Advisor cache updated. For new customizations, to update the cache, use the Advisor.Manager.refresh_customizations method.
The Model Reference Conversion Advisor opens.
Open and compile the model named sldemo_mdlref_conversion. For the conversion to succeed, the model that contains the subsystem must compile successfully.
mdl = "sldemo_mdlref_conversion"; open_system(mdl); set_param(mdl,SimulationCommand="Update")
The model compiles without warnings or errors.
Open the Model Reference Conversion Advisor for the Subsystem block named Bus Counter.
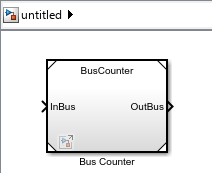
blk = "sldemo_mdlref_conversion/Bus Counter"; newmdl = "BusCounter"; Simulink.SubSystem.convertToModelReference(blk,newmdl);
### Successfully converted Subsystem block to Model block.
By default, the function does not replace the Subsystem block with a Model block. Instead, the function opens a new window that contains a Model block that references the new model.
Open and compile the example model named sldemo_mdlref_conversion. For the conversion to succeed, the model that contains the subsystem must compile successfully.
mdl = "sldemo_mdlref_conversion"; open_system(mdl) set_param(mdl,SimulationCommand="Update")

The model compiles without warnings or errors.
Convert the contents of the Subsystem block named Bus Counter to a referenced model named BusCounter, specifying these options:
Automatically fix problems when possible.
Replace the Subsystem block with a Model block that references the new model.
Check the simulation results before and after conversion.
subsys = "sldemo_mdlref_conversion/Bus Counter"; newmdl = "BusCounter"; Simulink.SubSystem.convertToModelReference(subsys,newmdl,... AutoFix=true,ReplaceSubsystem=true,CheckSimulationResults=true);
### Successfully converted Subsystem block to Model block.

The Subsystem block is replaced by a Model block that references the model named BusCounter.
One call to the Simulink.SubSystem.convertToModelReference function can convert multiple subsystems to referenced models.
Open and compile the model named f14. For the conversion to succeed, the model that contains the subsystem must compile successfully.
mdl = "f14"; open_system(mdl) set_param(mdl,SimulationCommand="Update")

The model compiles without warnings or errors.
Prepare the model for conversion to eliminate or reduce the number of issues identified during conversion.
To be able to check that the simulation results are equivalent before and after conversion, log the output of the model using Dataset format.
set_param(mdl,SaveOutput="on",SaveFormat="Dataset")
The new referenced model will inherit its configuration parameter settings from the parent model. Update the f14 model to use the recommended setting for signal resolution. This setting supports only explicitly specified signal resolution for Simulink.Signal objects.
set_param(mdl,SignalResolutionControl="UseLocalSettings")Convert the contents of the Subsystem blocks named Controller and Aircraft Dynamics Model to referenced models, specifying these options:
Automatically fix problems.
Replace the Subsystem blocks with Model blocks that reference the new models.
Check simulation results before and after conversion.
ss1 = "f14/Controller"; ss2 = "f14/Aircraft Dynamics Model"; mdl1 = "Controller"; mdl2 = "AircraftDynamics"; Simulink.SubSystem.convertToModelReference([ss1 ss2],[mdl1 mdl2],... AutoFix=true,ReplaceSubsystem=true,CheckSimulationResults=true)
### Successfully converted Subsystem block to Model block.

The Subsystem blocks named Controller and Aircraft Dynamics Model are replaced by Model blocks that reference the models named Controller and AircraftDynamics, respectively.