Author a Simple Activity Diagram
Activity diagrams describe the functional flow behavior of an architectural system. You can use activity diagrams in early phases of system design to elaborate on end system goals. To learn about activity diagram concepts, see System Composer Concepts.
An activity describes system behavior that models the flow of tokens from inputs to outputs through a controlled sequence of actions. An activity diagram contains action nodes with pins connected by flow lines. Use activity to conceptualize a system, visualize functional flow through actions or decisions, and understand how system components interact with one another.
This topic shows you how to inspect different parts of an activity diagram and how to author each of the nodes. You will learn how to:
Begin token flow in your activity diagram. You will use an initial node and a control flow.
Represent actions in your activity diagram.
Create an action node with MATLAB® function behavior.
Create an action node with a nested activity.
Use MATLAB action nodes without MATLAB functions to initialize object tokens.
Use control nodes to manipulate token flows.
Use a fork node to replicate a control token in two control flows.
Use a decision node to route the input token to one of the output flows.
Create loops with control nodes.
Consume tokens and terminate your activity with a flow final node and an activity final node.
You can allocate elements of an activity diagram to elements of a System Composer™ architecture model using the Allocation Editor to more fully describe your functional architectural design. For more information, see Design Architectures and Activity Diagram for Mobile Robot.
Open Model Activity Diagram
This example shows how to author a simple activity diagram.
open("ShoppingProcessActivity.slx");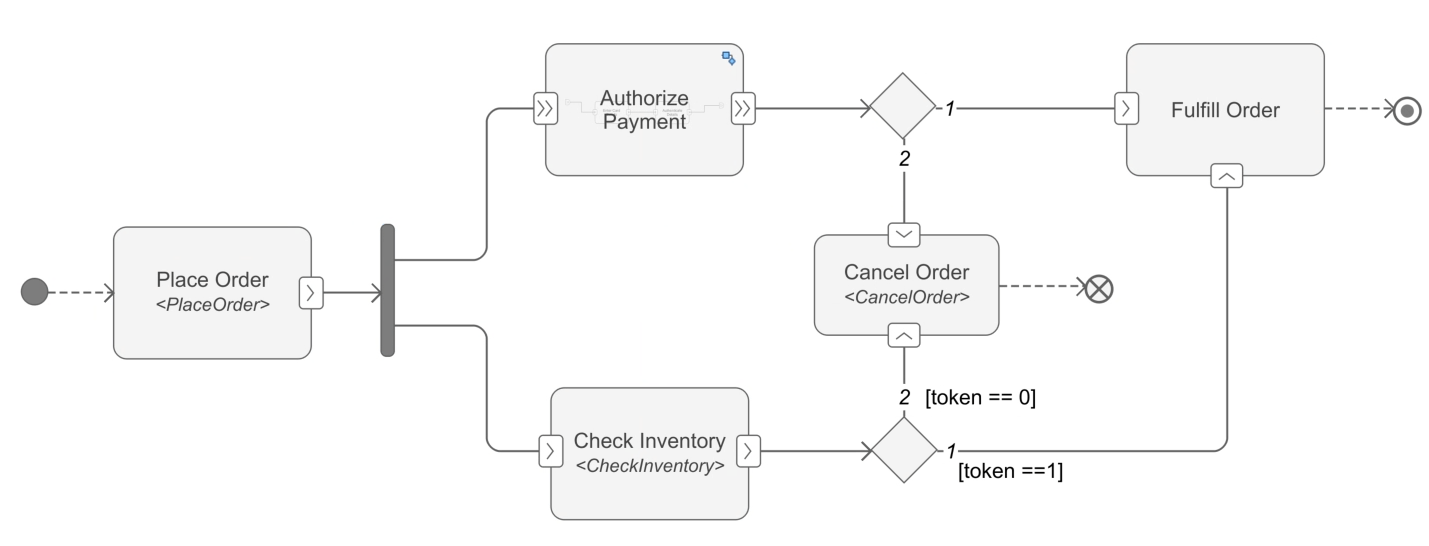
Token Flow in Activity Diagrams
Tokens are objects that flow in the activity diagram. A token can represent data such as structures and integers, or a token can simply pass on the control. An object token represents an object, such as a piece of data. A control token represents a control or a triggering event that does not carry any data.
To begin your activity, use an Initial Node to place a control token on the single outgoing flow.

A flow in an activity diagram connects two nodes. A dashed line represents a control flow. A solid line represents an object flow. Tokens in an object flow contains token data on which actions operate. You can use object flows to route input or output tokens to carry information or physical items between object nodes. Tokens in a control flow trigger the execution of actions. You can use control flows to model transfer of control from one Action Node to another.
Click the right side the initial node and drag to generate a control flow. Then, use marquee draw to select the action node that appears to instantiate it. The control flow transports the control token to the action node and begins execution.
Author Activity Diagram Action Nodes
In an activity diagram, you can generate tokens and read tokens using an Action Node. An action node is a key building block in an activity diagram. An action node represents an action to be executed. Action nodes consume input tokens and produce output tokens on pins. Use a MATLAB function or a nested activity diagram to describe the behavior of an action node.
You can add an action node in your activity diagram by clicking and dragging the
action node ![]() icon from the palette on the left or from the
Modeling tab on the toolstrip to any location on the
canvas.
icon from the palette on the left or from the
Modeling tab on the toolstrip to any location on the
canvas.

Author Action Node with MATLAB Function Behavior
The first action node of an activity diagram with a MATLAB function behavior determines how the control token that begins the action produces an object token on the action node output pin. A pin acts as a buffer for object tokens and directs tokens into or out of an action node. The directionality of the pin represents input or output. You can connect pins by object flows. Use pins to route an object token to or from an Action Node. Pins are also used to store object tokens before or during execution. You can use pins only for object flows.
To implement MATLAB function behavior, in the Property
Inspector, set Behavior Type to
MATLAB. Then, in the MATLAB Function
Name text box, enter the name of your function.

To view the PlaceOrder.m function file in the MATLAB editor, double-click the Place Order action
node.
function item = PlaceOrder() items = {'Apple', 'Banana', 'Cherry', 'Date'}; item = randi(4,1); ordered_item = items{item}; fprintf('You selected: %s\n', ordered_item); end
The PlaceOrder function selects a random item from the list
to order.. The function contains no input arguments and one output argument. The
output argument item corresponds to the output pin on the action
node.
To create a pin on an action node, pause on the edge of an action node and click the blue pin. Select whether to create an input pin or an output pin.

A type defines the contents of a token that flows through a pin. A type has dimension, unit, complexity, minimum, maximum and description. A value type token is a type assigned to a single value. A composite type token is equivalent to a bus structure that contains field of different values and data types. A MATLAB class type token references a MATLAB class on the path that defines a complex object with properties and methods. You can use a built-in MATLAB class or define your own MATLAB class.
You can select the pin and view its types in the Types
Editor to view the corresponding Item type with
expected dimensions 1.

Note
When you set Dimensions to 3, the
Types Editor automatically interprets the dimensions as a
column vector [1,3].
Match Action Node Pins to MATLAB Function Arguments
When the input and output arguments in the MATLAB function file match the input and output pins on your action node, you can control the expected behavior of the action node using the linked MATLAB function.
On the action node, in the Property Inspector, select Behavior Type as MATLAB, then link to a MATLAB function file on the path.
Right-click the action node, and from the context menu, select the menu option Match action pins to MATLAB function arguments.
The names and numbers of input and output pins on the action node match the names and numbers of input and output arguments in the linked MATLAB function.
Use Nested Activity to Describe Action
You can represent an action node in an activity diagram as a nested activity. The action that you describe using nested activity can only be executed sequentially and cannot have multiple concurrent invocations.
When an action starts, one instance of the action executes, and if new tokens arrive, they wait in the input pin. The input pin is a queue. The Token Multiplicity parameter in the Property Inspector for an input pin determines the size of the queue.

To implement a nested activity, in the Property Inspector, set
Behavior Type to Activity.
Then, to author your nested activity, double-click your action node.
A parameter node routes tokens into or out of a nested activity diagram. When a pin is created, a corresponding parameter node will be created inside the nested activity. Use a parameter node to define how tokens enter or leave a nested activity. There are two types of parameter nodes input and output.

The nested activity Authorize Payment executes normally
according to the MATLAB function behaviors on each of the serially connected action nodes
Enter Card Details and Authenticate
Details.
Use MATLAB Action Node Without MATLAB Function to Initialize Object Token
When you author your activity diagram and connect flow lines between object pins on action nodes, to describe the sequence of actions, you can use a MATLAB action without any MATLAB function.
Note
For an action node where a MATLAB function is not defined, a default token with all attributes
set to 0 is created on the output pin.
The Cancel Order action node with Behavior
Type set to MATLAB, has no defined
MATLAB Function Name. You can also specify the output pin
type to initialize an object token type for the next action node.
Use Action Node to Generate Control Flow
To generate control flow from an action node, click on side of the node and drag it to the other nodes.

Use Control Nodes to Manipulate Token Flows
A control node routes a logical flow of tokens through the system. Use control nodes and flows to route tokens. Control nodes can be used to initialize, split, merge, and terminate token flows.
Use Fork Node to Split Control Flow
A Join or Fork Node node replicates an input control token on each output flow when implemented as a fork node.

The control flows transport the control tokens to two different action nodes and begins execution.
Use Decision Node to Create Conditional Flow
A Decision or Merge Node routes an input token to a particular output flow based on the evaluation of decision conditions when implemented as a decision node. Use a decision node to manipulate token flow to demonstrate this scenario: When enough battery life remains for the robot to follow the calculated path distance, the robot can follow its path. When inventory

To access the token flowing through the flow, us the built-in keyword
token. When the equation token==1
evaluates to true, the token continues to the Fulfill
Order action node. Otherwise, the token is routed to the
Cancel Order action node.
End Flows and Activity with Final Nodes
You can use a Flow Final Node to terminate one object or control, but not the entire activity. You can use an Activity Final Node to terminate the incoming token and the parent activity.

After the process completes one cycle, the activity ends via an activity final node.
Simulate and Validate Activity Diagrams
Now that you know how to author an activity diagram for a mobile robot following a path, you can simulate the activity diagram to visualize token flow. For more information, see Simulate, Visualize, and Validate Activity Diagrams.
See Also
Functions
Tools
Blocks
- Initial Node | Action Node | Pin | Parameter Node | Decision or Merge Node | Join or Fork Node | Flow Final Node | Activity Final Node