Organize and Link Requirements for Mobile Robot
The first step in model-based systems engineering (MBSE) design using System Composer™ is to set up requirements. This functionality requires a Requirements Toolbox™ license.
Requirements are a collection of statements describing the desired behavior and characteristics of a system. Requirements ensure system design integrity and are achievable, verifiable, unambiguous, and consistent with each other. Each level of design should have appropriate requirements. This mobile robot example has three sets of requirements.
Stakeholder needs — A set of end-user needs. Stakeholders are interested in attributes of the mobile robot associated with endurance, payload, speed, autonomy, and reliability.
System requirements — A set of requirements that are linked closely with system-level design. System requirements include the derived requirements that describe how the system responds to stakeholder needs.
Implementation requirements — A set of requirements that specify subsystems in the model. Implementation requirements include specifications for the battery, structure, propulsion, path generation, position, controller, and component life for individual subsystems.
By linking one requirement set to another, each high-level requirement can be traced to implementation. As the MBSE design evolves, you can use iterative requirements analysis to enhance requirement traceability and coverage. You can use the traceability diagram to visualize requirement traceability. See Visualize Links with Traceability Diagrams (Requirements Toolbox).
Note
This example uses Simscape™ blocks. If you do not have a Simscape license, you can open the model but can only make basic changes, such as modifying block parameters.
Link Stakeholder Requirements to System Requirements
The mobile robot example includes a functional, logical, and physical architecture that fulfills stakeholder needs, system requirements, and implementation requirements.
1. Launch the project.
openProject("scMobileRobotExample");2. Load these systems in memory to view their requirement links.
Logical architecture model
systemcomposer.loadModel("scMobileRobotLogicalArchitecture");Physical architecture model
systemcomposer.loadModel("scMobileRobotHardwareArchitecture");3. Load these requirement sets into memory.
Stakeholder needs
slreq.load("scMobileRobotStakeholderNeeds");System requirements
slreq.load("scMobileRobotRequirements");Implementation requirements
slreq.load("scMobileRobotSubsystemRequirements");4. Open the Requirements Editor (Requirements Toolbox).
slreq.editor
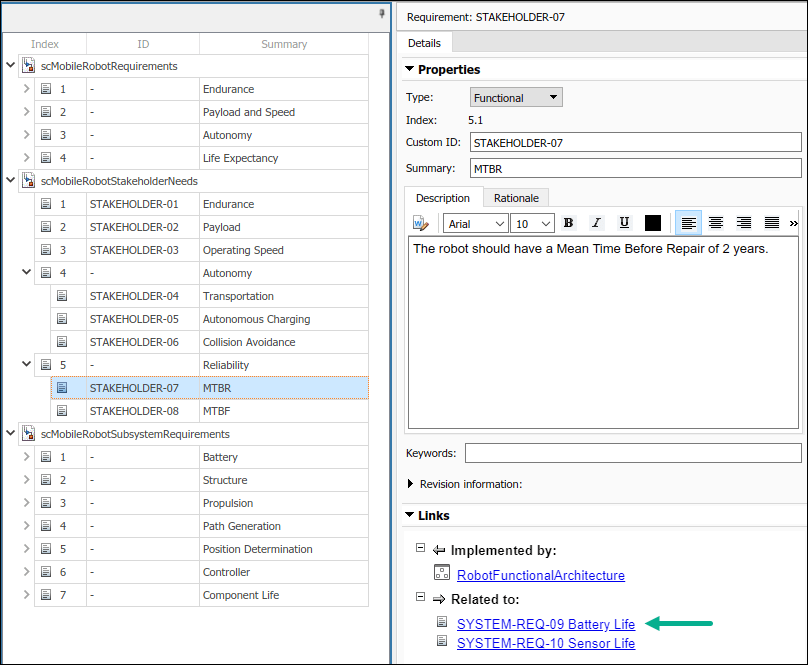
You can link stakeholder needs to derived requirements to keep track of high-level goals. The Mean Time Before Repair (MTBR) requirement, STAKEHOLDER-07, is refined by the Battery Life requirement, SYSTEM-REQ-09.
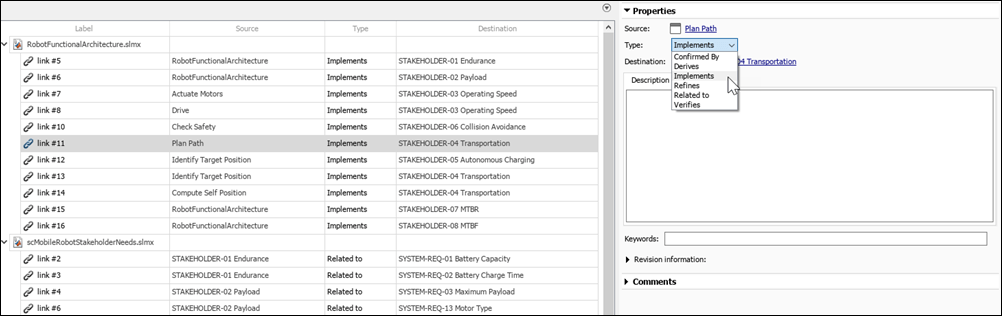
You can set a specific link type. To change link types, in the Requirements Editor (Requirements Toolbox), select Show Links. For more information, see Create and Store Links (Requirements Toolbox).
To return to interacting with requirements, in the Requirements Editor (Requirements Toolbox), select Show Requirements. The Transportation stakeholder needs requirement, STAKEHOLDER-04, will be implemented by the Localization system requirement, SYSTEM-REQ-05. The robot must be able to determine its current position with a specified tolerance. Right-click SYSTEM-REQ-05 and select Select for Linking with Requirement. Then, right-click STAKEHOLDER-04 and select Create a link from SYSTEM-REQ-05 to STAKEHOLDER-04.
References
[1] Rahman, Mohd Azizi Abdul, Katsuhiro Mayama, Takahiro Takasu, Akira Yasuda, and Makoto Mizukawa. “Model-Driven Development of Intelligent Mobile Robot Using Systems Modeling Language (SysML).” In Mobile Robots: Control Architectures, Bio-Interfacing, Navigation, Multi Robot Motion Planning and Operator Training, edited by Janusz Będkowski. InTech Open, 2011. https://doi.org/10.5772/26906.
See Also
Apps
- Requirements Editor (Requirements Toolbox) | Requirements Manager (Requirements Toolbox)
Functions
slreq.editor(Requirements Toolbox) |slreq.load(Requirements Toolbox) |systemcomposer.loadModel