estimateCameraMatrix
(Not recommended) Estimate camera projection matrix from world-to-image point correspondences
estimateCameraMatrix is not recommended. Use the estimateCameraProjection function instead. For more information, see Version History.
Syntax
Description
camMatrix = estimateCameraMatrix(imagePoints,worldPoints)
[
also returns the reprojection error that quantifies the accuracy of the projected image
coordinates.camMatrix,reprojectionErrors] = estimateCameraMatrix(imagePoints,worldPoints)
Examples
Load a 3-D point cloud data captured by an RGB-D sensor into the workspace.
ld = load('object3d.mat');
ptCloud = ld.ptCloud; Remove points with Inf or NaN coordinates from the point cloud.
[validPtCloud,validIndices] = removeInvalidPoints(ptCloud);
Read the valid world point coordinates. Each entry specifies the x, y, z coordinates of a point in the point cloud.
worldPoints = validPtCloud.Location;
Define the corresponding image point coordinates as a orthographic projection of point cloud data onto the yz-plane.
indices = 1:ptCloud.Count; [y,z] = ind2sub([size(ptCloud.Location,1),size(ptCloud.Location,2)],indices); imagePoints = [y(validIndices)' z(validIndices)'];
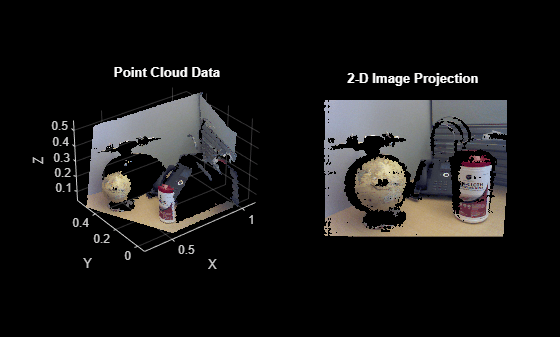
Generate the 2-D image projection by using the image point coordinates and their color values.
projImage = zeros(max(imagePoints(:,1)),max(imagePoints(:,2)),3); rgb = validPtCloud.Color; for j = 1:length(rgb) projImage(imagePoints(j,1),imagePoints(j,2),:) = rgb(j,:); end
Display the point cloud data and the corresponding 2-D image projection.
figure subplot(1,2,1) pcshow(ptCloud) xlabel('X'); ylabel('Y'); zlabel('Z'); title('Point Cloud Data','Color',[1 1 1]) subplot(1,2,2) imshow(uint8(projImage)) title('2-D Image Projection','Color',[1 1 1])
Estimate the camera projection matrix and reprojection error by using the known world points and the image points.
[camMatrix,reprojectionErrors] = estimateCameraMatrix(imagePoints,worldPoints);
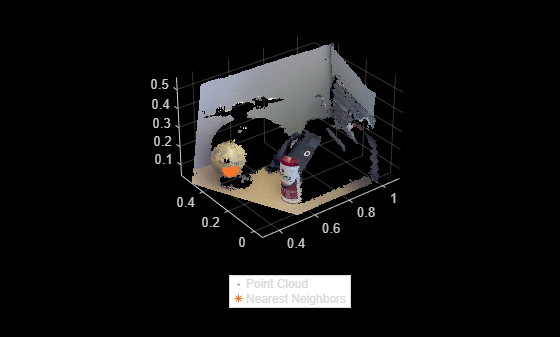
Use the estimated camera projection matrix as input to the findNearestNeighbors function and find the nearest neighbors of a query point.
point = [0.4 0.3 0.2]; % Specify the query point K = 1000; % Specify the number of nearest neighbors to be determined [indices,dists] = findNearestNeighbors(ptCloud,point,K,camMatrix); % Get the indices and distances of nearest neighbors
Use the select function to get the point cloud data of nearest neighbors.
ptCloudB = select(ptCloud,indices);
Display the input point cloud and its nearest neighbors.
figure pcshow(ptCloud) hold on plot3(ptCloudB.Location(:,1),ptCloudB.Location(:,2),ptCloudB.Location(:,3),'*') hold off legend('Point Cloud','Nearest Neighbors','Location','southoutside','Color',[1 1 1])
Input Arguments
Output Arguments
Tips
You can use the estimateCameraMatrix function to estimate a camera projection
matrix:
If the world-to-image point correspondences are known, and the camera intrinsics and extrinsics parameters are not known, you can use the
cameraMatrixfunction.To compute 2-D image points from 3-D world points, refer to the equations in
camMatrix.For use with the
findNearestNeighborsobject function of thepointCloudobject. The use of a camera projection matrix speeds up the nearest neighbors search in a point cloud generated by an RGB-D sensor, such as Microsoft® Kinect®.
Algorithms
Given the world points X and the image points x, the camera projection matrix C, is obtained by solving the equation
λx = CX.
The equation is solved using the direct linear transformation (DLT) approach [1]. This approach formulates a homogeneous linear system of equations, and the solution is obtained through generalized eigenvalue decomposition.
Because the image point coordinates are given in pixel values, the approach for computing
the camera projection matrix is sensitive to numerical errors. To avoid numerical errors, the
input image point coordinates are normalized, so that their centroid is at the origin. Also,
the root mean squared distance of the image points from the origin is
sqrt(2). These steps summarize the process for estimating the camera
projection matrix.
Normalize the input image point coordinates with transform T.
Estimate camera projection matrix CN from the normalized input image points.
Compute the denormalized camera projection matrix C as CNT-1.
Compute the reprojected image point coordinates xE as CX.
Compute the reprojection errors as
reprojectionErrors = |x− xE|.
References
[1]
Version History
Introduced in R2019aSee Also
Apps
Objects
stereoParameters|cameraCalibrationErrors|intrinsicsEstimationErrors|extrinsicsEstimationErrors|cameraIntrinsics
Functions
estimateCameraProjection|estimateCameraParameters|showReprojectionErrors|showExtrinsics|undistortImage|detectCheckerboardPoints|generateCheckerboardPoints|cameraProjection|estworldpose|estimateEssentialMatrix|estimateFundamentalMatrix|findNearestNeighbors
Topics
- Evaluating the Accuracy of Single Camera Calibration
- Structure from Motion from Two Views
- Structure from Motion from Multiple Views
- Depth Estimation from Stereo Video
- Code Generation for Depth Estimation from Stereo Video
- What Is Camera Calibration?
- Using the Single Camera Calibrator App
- Using the Stereo Camera Calibrator App