undistortImage
Correct image for lens distortion
Syntax
Description
[ removes the lens
distortion in the input image J,camIntrinsics]
= undistortImage(I,intrinsics)I using the camera parameters
defined in intrinsics. The function returns the corrected image
J and the undistorted camera intrinsic parameters,
camIntrinsics.
[
specifies the interpolation method for the function to use on the input
image.J,camIntrinsics]
= undistortImage(I,intrinsics,interp)
[ specifies options using
one or more name-value arguments in addition to any combination of arguments from
previous syntaxes. For example, J,camIntrinsics]
= undistortImage(___,Name=Value)(FillValues=[0 0.4470 0.7410])
sets the output pixel values that are outside the input image boundaries to a blue
color.
Examples
Create a set of calibration images.
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","mono"));
Detect calibration pattern.
[imagePoints,patternDims] = detectCheckerboardPoints(images.Files);
Generate world coordinates of the corners of the squares. The square size is in millimeters.
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the camera.
I = readimage(images,1); imageSize = size(I,1:2); cameraParams = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
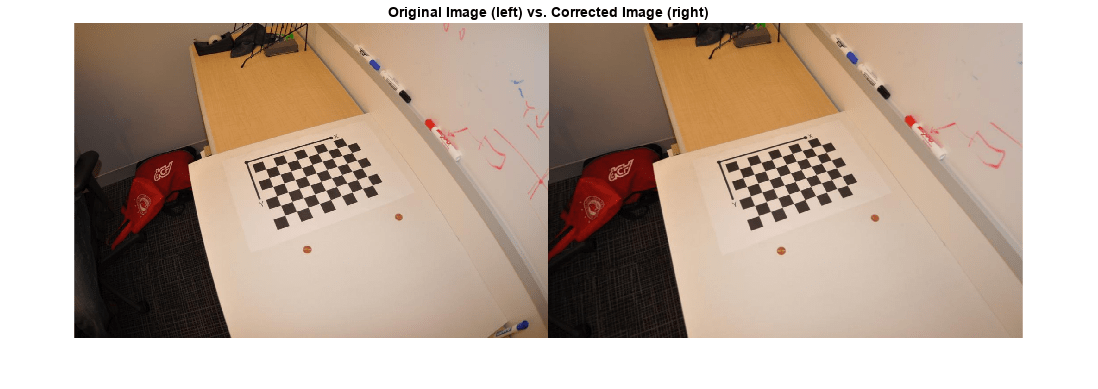
Remove lens distortion and display results.
I = images.readimage(1); J1 = undistortImage(I,cameraParams);
figure; imshowpair(I,J1,"montage"); title("Original Image (left) vs. Corrected Image (right)");
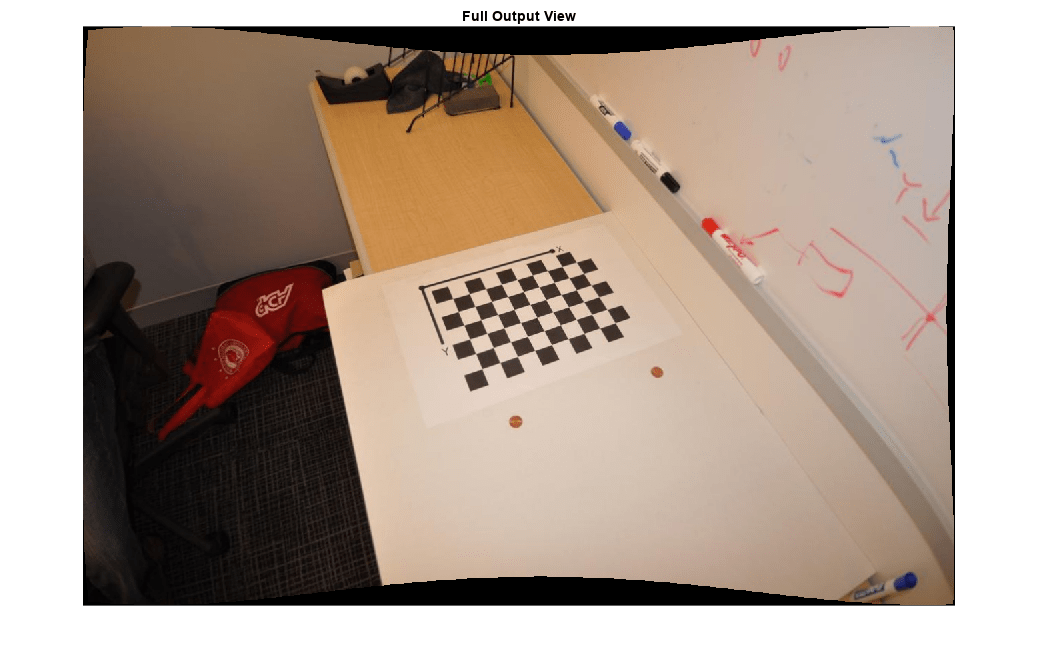
J2 = undistortImage(I,cameraParams,OutputView="full"); figure; imshow(J2); title("Full Output View");
Create an imageDatastore object containing calibration images.
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","mono")); imageFileNames = images.Files;
Detect the calibration pattern.
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames);
Generate world coordinates of the corners of the squares. The square size is in millimeters.
squareSize = 29; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the camera.
I = readimage(images,10); imageSize = [size(I, 1), size(I, 2)]; params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize); intrinsics = params.Intrinsics;
Load an image and detect the checkerboard points.
points = detectCheckerboardPoints(I);
Undistort the points
undistortedPoints = undistortPoints(points,intrinsics);
Undistort the image.
[J, newIntrinsics] = undistortImage(I,intrinsics,OutputView="full");Translate undistorted points
newOrigin = intrinsics.PrincipalPoint - newIntrinsics.PrincipalPoint;
undistortedPoints = [undistortedPoints(:,1) - newOrigin(1), ...
undistortedPoints(:,2) - newOrigin(2)];Display the results
figure; imshow(I); hold on; plot(points(:,1),points(:,2),"r*-"); title("Detected Points"); hold off;

figure; imshow(J); hold on; plot(undistortedPoints(:,1),undistortedPoints(:,2),"g*-"); title("Undistorted Points"); hold off;

Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: (FillValues=[0 0.4470 0.7410]) sets the output pixel values that
are outside the input image boundaries to a blue color.
Output pixel fill values, specified as an array containing one or more fill values. When the
corresponding inverse transformed location in the input image lies
completely outside the input image boundaries, you use the fill values
for output pixels. When you use a 2-D grayscale input image, you must
set the FillValues to scalar. When you use a
truecolor, FillValues can be a scalar or a
3-element vector of RGB values.
Size of output image, specified as "same", "full", or
"valid". When you set the property to
"same", the function sets the output image to
match the size of the input image. When you set the property to
"full", the output includes all pixels from the
input image. When you set the property to "valid",
the function crops the output image to contain only valid pixels.
For the input image:
| OutputView | Output Image |
|---|---|
"same" | Match the size of the input image.
|
"full" | All pixels from the input image.
|
"valid" | Only valid pixels from the input image.
|