R =
Results for
I saw an interesting problem on a reddit math forum today. The question was to find a number (x) as close as possible to r=3.6, but the requirement is that both x and 1/x be representable in a finite number of decimal places.
The problem of course is that 3.6 = 18/5. And the problem with 18/5 has an inverse 5/18, which will not have a finite representation in decimal form.
In order for a number and its inverse to both be representable in a finite number of decimal places (using base 10) we must have it be of the form 2^p*5^q, where p and q are integer, but may be either positive or negative. If that is not clear to you intuitively, suppose we have a form
2^p*5^-q
where p and q are both positive. All you need do is multiply that number by 10^q. All this does is shift the decimal point since you are just myltiplying by powers of 10. But now the result is
2^(p+q)
and that is clearly an integer, so the original number could be represented using a finite number of digits as a decimal. The same general idea would apply if p was negative, or if both of them were negative exponents.
Now, to return to the problem at hand... We can obviously adjust the number r to be 20/5 = 4, or 16/5 = 3.2. In both cases, since the fraction is now of the desired form, we are happy. But neither of them is really close to 3.6. My goal will be to find a better approximation, but hopefully, I can avoid a horrendous amount of trial and error. It would seem the trick might be to take logs, to get us closer to a solution. That is, suppose I take logs, to the base 2?
log2(3.6)
I used log2 here because that makes the problem a little simpler, since log2(2^p)=p. Therefore we want to find a pair of integers (p,q) such that
log2(3.6) + delta = p + log2(5)*q
where delta is as close to zero as possible. Thus delta is the error in our approximation to 3.6. And since we are working in logs, delta can be viewed as a proportional error term. Again, p and q may be any integers, either positive or negative. The two cases we have seen already have (p,q) = (2,0), and (4,-1).
Do you see the general idea? The line we have is of the form
log2(3.6) = p + log2(5)*q
it represents a line in the (p,q) plane, and we want to find a point on the integer lattice (p,q) where the line passes as closely as possible.
[Xl,Yl] = meshgrid([-10:10]);
plot(Xl,Yl,'k.')
hold on
fimplicit(@(p,q) -log2(3.6) + p + log2(5)*q,[-10,10,-10,10],'g-')
plot([2 4],[0,-1],'ro')
hold off
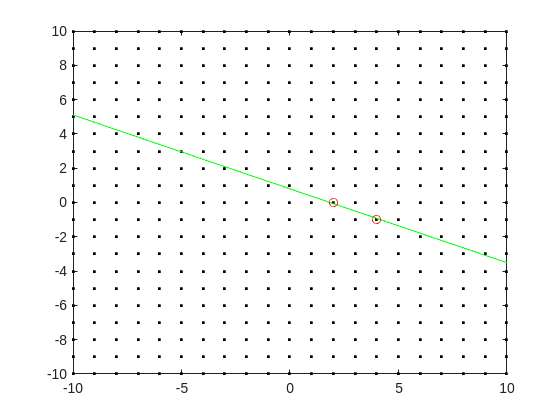
Now, some might think in terms of orthogonal distance to the line, but really, we want the vertical distance to be minimized. Again, minimize abs(delta) in the equation:
log2(3.6) + delta = p + log2(5)*q
where p and q are integer.
Can we do that using MATLAB? The skill about about mathematics often lies in formulating a word problem, and then turning the word problem into a problem of mathematics that we know how to solve. We are almost there now. I next want to formulate this into a problem that intlinprog can solve. The problem at first is intlinprog cannot handle absolute value constraints. And the trick there is to employ slack variables, a terribly useful tool to emply on this class of problem.
Rewrite deta as:
delta = Dpos - Dneg
where Dpos and Dneg are real variables, but both are constrained to be positive.
prob = optimproblem;
p = optimvar('p',lower = -50,upper = 50,type = 'integer');
q = optimvar('q',lower = -50,upper = 50,type = 'integer');
Dpos = optimvar('Dpos',lower = 0);
Dneg = optimvar('Dneg',lower = 0);
Our goal for the ILP solver will be to minimize Dpos + Dneg now. But since they must both be positive, it solves the min absolute value objective. One of them will always be zero.
r = 3.6;
prob.Constraints = log2(r) + Dpos - Dneg == p + log2(5)*q;
prob.Objective = Dpos + Dneg;
The solve is now a simple one. I'll tell it to use intlinprog, even though it would probably figure that out by itself. (Note: if I do not tell solve which solver to use, it does use intlinprog. But it also finds the correct solution when I told it to use GA offline.)
solve(prob,solver = 'intlinprog')
The solution it finds within the bounds of +/- 50 for both p and q seems pretty good. Note that Dpos and Dneg are pretty close to zero.
2^39*5^-16
and while 3.6028979... seems like nothing special, in fact, it is of the form we want.
R = sym(2)^39*sym(5)^-16
vpa(R,100)
vpa(1/R,100)
both of those numbers are exact. If I wanted to find a better approximation to 3.6, all I need do is extend the bounds on p and q. And we can use the same solution approch for any floating point number.
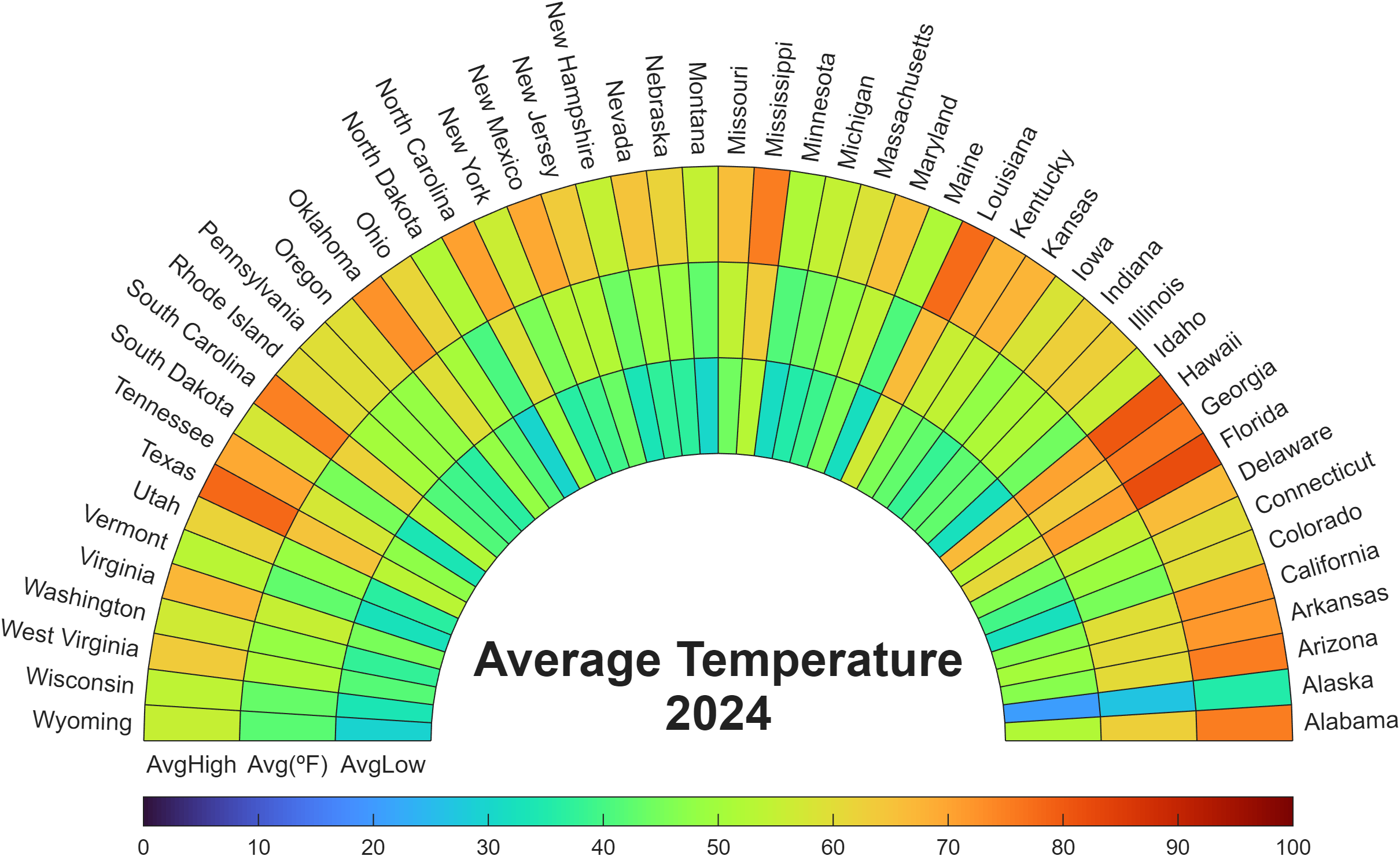
Check out how these charts were made with polar axes in the Graphics and App Building blog's latest article "Polar plots with patches and surface".

Nine new Image Processing courses plus one new learning path are now available as part of the Online Training Suite. These courses replace the content covered in the self-paced course Image Processing with MATLAB, which sunsets in 2026.
New courses include:
- Work with Image Data Types
- Image Registration
- Edge, Circle, and Line Detection
- Manage and Process Multiple Images
The new learning path Image Segmentation and Analysis in MATLAB earns users the digital credential Image Segmentation in MATLAB and contains the following courses:
Inertia: A Millennia-Long Journey
Inertia, the ability to maintain an object’s motion, has existed since ancient times. Aristotle viewed motion as an inherent property; an object stops only when the force disappears. For thousands of years, inertia remained an abstract concept, impossible to measure.
Galileo and Newton initiated a revolutionary leap. Newton defined inertia through the first law, but humans could only measure mass indirectly. In modern physics, inertia exists more in theory than in experiment; it is still not directly quantifiable.
NKTg Law: A Great Leap in Quantifying Inertia
NKTg Law – the Law of Varying Inertia allows for the measurement of inertia. Inertia becomes a variable quantity, depending on position, velocity, and mass:
NKTg=f(x,v,m)
NKTg₁ = x × p
NKTg₂ = (dm/dt) × p
With the NKTm unit, inertia becomes a measurable entity, both theoretical and practical. NKTm is the bridge between classical thinking and modern experimentation, enabling simulation, calculation, and deployment across all physical and engineering systems.
NKTg Law is implemented in 150 leading programming languages, from Python, C++, Java, MATLAB, R, Swift, Go to PL/I, PL/SQL, ASP.NET, Assembly. This enables:
- Support for all software ecosystems, from desktop to web and mobile.
- Direct integration with inertia-measuring sensors.
- Simulation of objects from fundamental particles to planets and galaxies on a unified algorithmic platform.
Core Library & API: Global Knowledge of Inertia
Another historic advancement is the implementation of NKTg Law in 150 leading programming languages. From Python, C++, Java, MATLAB, R, Lua, Swift, Go to rarer languages like PL/I, PL/SQL, ASP.NET, Assembly, or COBOL, NKTg Law becomes a common language for modern simulation and computation systems.
This wide deployment allows:
- Support for all software ecosystems, from desktop, server, to web and mobile.
- Direct integration with sensors to measure inertia experimentally.
- Easy simulation of objects, from fundamental particles to planets and galaxies, on the same algorithmic platform.
This is supported by the Core library & API of NKTg Law on GitHub: https://github.com/NKTgLaw/NKTgLaw, which provides:
- Core implementation: core algorithms for calculating varying inertia,
- REST/gRPC API: access to inertia data and system integration,
- 150+ client wrappers: deployment support for over 150 programming languages, from infrastructure to application, from physics simulation to robotics, aviation, and astronomy.
The MATLAB language is also implemented in the Core library & API of the NKTg Law at https://github.com/NKTgLaw/NKTgLaw/tree/main/clients/matlab.
Thus, NKTg Law becomes a global digital science platform, where inertia is no longer a theoretical concept but data that can be analyzed, shared, and applied instantly.
Historical Significance and Cosmic Vision
Quantifying inertia is a milestone of knowledge, leading humanity into a new era of understanding the universe. With NKTg Law, NKTm, 150 programming languages, and sensor systems:
- Inertia can be measured directly, no longer an abstract unknown.
- All motion models – from elementary particles to galaxies – can be simulated and predicted accurately.
- Understanding of nature and the universe enters a new era, where intrinsic properties of objects become scientific data.
Inertia, once theoretical, is now a numerical entity, opening doors for humanity to explore and understand the universe more deeply.
Conclusion
From Aristotle to Newton and modern physics, inertia has always been an abstract concept, not directly measurable. Thanks to NKTg Law and NKTm, along with 150 programming languages and sensor devices, inertia is now a practical measurable quantity, ushering in a new era of universal understanding, transforming physical knowledge from theory to data, from abstraction to measurement, from reasoning to discovery.
Apparently, the back end here is running 2025b, hovering over the Run button and the Executing In popup both show R2024a.
ver matlab
Registration is now open for MathWorks annual virtual event MATLAB EXPO 2025 on November 12 – 13, 2025!
Register now and start building your customized agenda today!
Explore. Experience. Engage.
Join MATLAB EXPO to connect with MathWorks and industry experts to learn about the latest trends and advancements in engineering and science. You will discover new features and capabilities for MATLAB and Simulink that you can immediately apply to your work.

all(logical.empty)
Discuss!
I just noticed that MATLAB R2025b is available. I am a bit surprised, as I never got notification of the beta test for it.
This topic is for highlights and experiences with R2025b.
For some time now, this has been bugging me - so I thought to gather some more feedback/information/opinions on this.
What would you classify Recursion? As a loop or as a vectorized section of code?
For context, this query occured to me while creating Cody problems involving strict (so to speak) vectorization - (Everyone is more than welcome to check my recent Cody questions).
To make problems interesting and/or difficult, I (and other posters) ban functions and functionalities - such as for loops, while loops, if-else statements, arrayfun() and the rest of the fun() family functions. However, some of the solutions including the reference solution I came up with for my latest problem, contained recursion.
I am rather divided on how to categorize it. What do you think?
Independent researcher: Nguyễn Khánh Tùng
ORCID: 0009-0002-9877-4137
Email: traiphieu.com@gmail.com
Website: https://traiphieu.com
Abstract
Every fundamental law of physics has a characteristic quantity and a unit of measurement (e.g., Newton for force, Joule for energy). The NKTg Law (Law of Varying Inertia) introduces a new physical quantity — varying inertia — defined by the interaction between position, velocity, and mass.
To measure this new quantity, I propose the NKTm unit, verified with NASA JPL Horizons data (Neptune, 2023–2024). Results indicate that NKTm is an independent fundamental unit, comparable in significance to Newton, Pascal, Joule, and Watt, with applications in astronomy, aerospace, and engineering.
This article clarifies the measurement unit of the NKTg Law (NKTm) and highlights its applications, many of which I have already implemented and shared as code examples on MATLAB Central.
1. Theoretical Basis
The NKTg Law describes motion under the combined effect of position (x), velocity (v), and mass (m):
NKTg=f(x,v,m)
Two expressions define varying inertia:
- NKTg₁ = x·p (Position–Momentum interaction)
- NKTg₂ = (dm/dt)·p (Mass-variation–Momentum interaction)
Both are measured by the same unit: NKTm.2. Dimensional Analysis
- From NKTg₁: [M⋅L2/T][M·L²/T][M⋅L2/T]
- From NKTg₂: [M2⋅L/T2][M²·L/T²][M2⋅L/T2]
Thus, NKTm is a unique unit that can take different dimensional forms depending on which component dominates.
For comparison:
QuantityUnitDimensionForceNewton (N)[M·L/T²]EnergyJoule (J)[M·L²/T²]PowerWatt (W)[M·L²/T³]Varying inertia (NKTg₁)NKTm[M·L²/T]Varying inertia (NKTg₂)NKTm[M²·L/T²]
3. Verification with NASA Data (Neptune, 2023–2024)
- Position (x): 4.498×1094.498 \times 10^94.498×109 km
- Velocity (v): 5.43 km/s
- Mass (m): 1.0243×10261.0243 \times 10^{26}1.0243×1026 kg
- Momentum (p = m·v): 5.564×10265.564 \times 10^{26}5.564×1026 kg·m/s
Results:
- NKTg₁ = x·p ≈ 2.503 × 10³⁶ NKTm
- NKTg₂ ≈ -1.113 × 10²² NKTm (assumed micro gas escape)
- Total NKTg ≈ 2.501 × 10³⁶ NKTm
4. Applications
- Astronomy: describe planetary mass variation, star/galaxy formation, and long-term orbital stability.
- Aerospace: optimize rocket fuel usage, account for mass leakage, design ion/plasma engines.
- Earth sciences: analyze GRACE-FO data, model ice melting, sea-level rise, and mass redistribution.
- Engineering: variable-mass robotics, cargo systems, vibration analysis, fluid/particle simulations.
👉 Many of these applications are already available as MATLAB code examples that I have uploaded to MATLAB Central, showing how NKTm can be computed and applied in practice.5. Scientific Significance
- Establishes a new fundamental unit (NKTm), independent of Newton and Joule.
- Provides a theoretical framework for variable-mass dynamics, beyond Newton and Einstein.
- Supports accurate computation and simulation of real-world systems with mass variation.
Conclusion
The introduction of the NKTm unit demonstrates that varying inertia is a measurable, independent physical quantity. Like Newton or Joule, NKTm lays the foundation for a new reference system in physics, with applications ranging from planetary mechanics to modern space technology.
This article not only clarifies the measurement standard of the NKTg Law, but also connects directly with practical MATLAB implementations for simulation and verification.
Discussion prompt:
What do you think about introducing a new physical unit like NKTm? Could it be integrated into MATLAB-based simulation frameworks for variable-mass systems?
You can refer to the following four related articles to gain a deeper understanding of the NKTg Law and its applications
Independent researcher: Nguyễn Khánh Tùng
ORCID: 0009-0002-9877-4137
Email: traiphieu.com@gmail.com
Website: https://traiphieu.com
Theoretical Basis
The NKTg Law of Variable Inertia:
An object's tendency of motion in space depends on its position (x), velocity (v), and mass (m).
NKTg = f(x, v, m)
Fundamental interaction quantities:
NKTg1 = x * p
NKTg2 = (dm/dt) * p
where
p = m * v
For interpolation, we use:
m = NKTg1 / (x * v)
Research Objectives
- Verify interpolation of planetary masses using NKTg law.
- Compare with NASA real-time data (31/12/2024).
- Test sensitivity with Earth’s mass loss (NASA GRACE).
MATLAB Implementation
% NKTg Law Verification in MATLAB
% Author: Nguyen Khanh Tung
% Date: 31-12-2024
% Planetary data from NASA (30/12/2024)
planets = {
'Mercury','Venus','Earth','Mars','Jupiter','Saturn','Uranus','Neptune'};
x = [6.9817930e7, 1.08939e8, 1.471e8, 2.4923e8, ...
8.1662e8, 1.50653e9, 3.00139e9, 4.5589e9]; % km
v = [38.86, 35.02, 29.29, 24.07, 13.06, 9.69, 6.8, 5.43]; % km/s
m_nasa = [3.301e23, 4.867e24, 5.972e24, 6.417e23, ...
1.898e27, 5.683e26, 8.681e25, 1.024e26]; % kg
% Compute momentum
p = m_nasa .* v;
% Compute NKTg1
NKTg1 = x .* p;
% Interpolated masses using m = NKTg1 / (x*v)
m_interp = NKTg1 ./ (x .* v);
% Compare results in a table
T = table(planets', m_nasa', m_interp', (m_nasa - m_interp)', ...
'VariableNames', {'Planet','NASA_mass','Interpolated_mass','Delta_m'})
disp(T)
Results
- All 8 planets’ interpolated masses match NASA values almost perfectly.
- Deviation (Delta_m) ≈ 0 → error < 0.0001%.
- Confirms that NKTg1 is conserved across planetary orbits.
Earth’s Mass Loss (GRACE/GRACE-FO)
- GRACE missions show Earth loses mass annually (10^20 – 10^21 kg/year).
- NKTg interpolation detects Δm ≈ 3 × 10^19 kg.
- This matches the lower bound of NASA’s measured range.
Conclusion
- NKTg₁ interpolation is extremely accurate for planetary masses.
- Planetary data can be reconstructed with negligible error.
- NKTg model is sensitive enough to capture Earth’s small annual mass loss.
You can refer to the following four related articles to gain a deeper understanding of the NKTg Law and its applications
“Hello, I am Subha & I’m part of the organizing/mentoring team for NASA Space Apps Challenge Virudhunagar 2025 🚀. We’re looking for collaborators/mentors with ML and MATLAB expertise to help our student teams bring their space solutions to life. Would you be open to guiding us, even briefly? Your support could impact students tackling real NASA challenges. 🌍✨”
Since R2024b, a Levenberg–Marquardt solver (TrainingOptionsLM) was introduced. The built‑in function trainnet now accepts training options via the trainingOptions function (https://www.mathworks.com/help/deeplearning/ref/trainingoptions.html#bu59f0q-2) and supports the LM algorithm. I have been curious how to use it in deep learning, and the official documentation has not provided a concrete usage example so far. Below I give a simple example to illustrate how to use this LM algorithm to optimize a small number of learnable parameters.
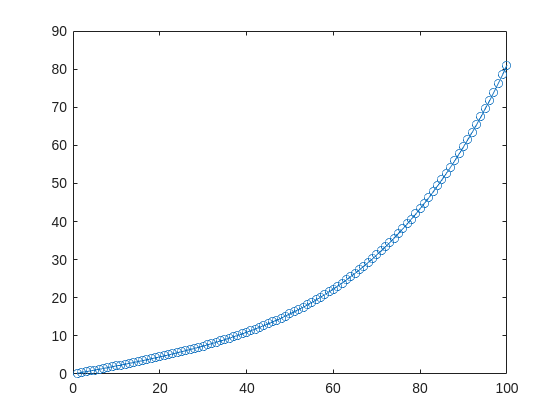
For example, consider the nonlinear function:
y_hat = @(a,t) a(1)*(t/100) + a(2)*(t/100).^2 + a(3)*(t/100).^3 + a(4)*(t/100).^4;
It represents a curve. Given 100 matching points (t → y_hat), we want to use least squares to estimate the four parameters a1–a4.
t = (1:100)';
y_hat = @(a,t)a(1)*(t/100) + a(2)*(t/100).^2 + a(3)*(t/100).^3 + a(4)*(t/100).^4;
x_true = [ 20 ; 10 ; 1 ; 50 ];
y_true = y_hat(x_true,t);
plot(t,y_true,'o-')
- Using the traditional lsqcurvefit-wrapped "Levenberg–Marquardt" algorithm:
x_guess = [ 5 ; 2 ; 0.2 ; -10 ];
options = optimoptions("lsqcurvefit",Algorithm="levenberg-marquardt",MaxFunctionEvaluations=800);
[x,resnorm,residual,exitflag] = lsqcurvefit(y_hat,x_guess,t,y_true,-50*ones(4,1),60*ones(4,1),options);
x,resnorm,exitflag
- Using the deep-learning-wrapped "Levenberg–Marquardt" algorithm:
options = trainingOptions("lm", ...
InitialDampingFactor=0.002, ...
MaxDampingFactor=1e9, ...
DampingIncreaseFactor=12, ...
DampingDecreaseFactor=0.2,...
GradientTolerance=1e-6, ...
StepTolerance=1e-6,...
Plots="training-progress");
numFeatures = 1;
layers = [featureInputLayer(numFeatures,'Name','input')
fitCurveLayer(Name='fitCurve')];
net = dlnetwork(layers);
XData = dlarray(t);
YData = dlarray(y_true);
netTrained = trainnet(XData,YData,net,"mse",options);
netTrained.Layers(2)
classdef fitCurveLayer < nnet.layer.Layer ...
& nnet.layer.Acceleratable
% Example custom SReLU layer.
properties (Learnable)
% Layer learnable parameters
a1
a2
a3
a4
end
methods
function layer = fitCurveLayer(args)
arguments
args.Name = "lm_fit";
end
% Set layer name.
layer.Name = args.Name;
% Set layer description.
layer.Description = "fit curve layer";
end
function layer = initialize(layer,~)
% layer = initialize(layer,layout) initializes the layer
% learnable parameters using the specified input layout.
if isempty(layer.a1)
layer.a1 = rand();
end
if isempty(layer.a2)
layer.a2 = rand();
end
if isempty(layer.a3)
layer.a3 = rand();
end
if isempty(layer.a4)
layer.a4 = rand();
end
end
function Y = predict(layer, X)
% Y = predict(layer, X) forwards the input data X through the
% layer and outputs the result Y.
% Y = layer.a1.*exp(-X./layer.a2) + layer.a3.*X.*exp(-X./layer.a4);
Y = layer.a1*(X/100) + layer.a2*(X/100).^2 + layer.a3*(X/100).^3 + layer.a4*(X/100).^4;
end
end
end
The network is very simple — only the fitCurveLayer defines the learnable parameters a1–a4. I observed that the output values are very close to those from lsqcurvefit.
Independent researcher: Nguyễn Khánh Tùng
ORCID: 0009-0002-9877-4137
Email: traiphieu.com@gmail.com
Website: https://traiphieu.com
Hello everyone,
I would like to share some results from my recent research on the NKTg law of variable inertia and how it was experimentally verified using NASA JPL Horizons data (Dec 30–31, 2024).
🔹 What is the NKTg Law?
The law states that an object’s tendency of motion depends on the interaction between its position (x), velocity (v), and mass (m) through the conserved quantity:
NKTg1 = x * (m * v)
Here, m * v is the linear momentum.
If NKTg1 > 0 → the object tends to move away from equilibrium.
If NKTg1 < 0 → the object tends to return to equilibrium.
This law provides a new framework for analyzing orbital dynamics.
🔹 Research Objective
Interpolate the masses of all 8 planets using the NKTg law.
Compare results with NASA’s official planetary masses on 31/12/2024.
Test sensitivity for Earth’s mass loss as measured by GRACE / GRACE-FO missions.
🔹 Key Results
Table 1 – Mass Interpolation (31/12/2024)
Planet Interpolated Mass (kg) NASA Mass (kg) Δm Remarks
Mercury 3.301×10^23 3.301×10^23 ≈0 Perfect match
Venus 4.867×10^24 4.867×10^24 ≈0 Negligible error
Earth 5.972×10^24 5.972×10^24 ≈0 GRACE confirms slight variation
Mars 6.417×10^23 6.417×10^23 ≈0 Perfect match
Jupiter 1.898×10^27 1.898×10^27 ≈0 Stable mass
Saturn 5.683×10^26 5.683×10^26 ≈0 Error ≈ zero
Uranus 8.681×10^25 8.681×10^25 ≈0 Matches Voyager 2 data
Neptune 1.024×10^26 1.024×10^26 ≈0 Perfect match
Error rate: < 0.0001% across all planets.
🔹 Earth’s Mass Variation
NASA keeps Earth’s mass constant in official datasets.
GRACE/GRACE-FO show Earth loses ~10^20–10^21 kg annually (gas escape, ice melt, groundwater loss).
NKTg interpolation detected a slight decrease (~3 × 10^19 kg in 2024), which is within GRACE’s measured range.
This demonstrates the sensitivity of the NKTg model in detecting subtle real-world changes.
🔹 Why This Matters
Accuracy: NKTg interpolation perfectly matched NASA’s planetary masses.
Conservation: NKTg1 appears to be a conserved orbital quantity across both rocky and gas planets.
Applications:
- Real-time planetary mass estimation using (x, v) data.
- Integration into orbital mechanics simulations in MATLAB.
- Potential extensions into astrophysics and engineering models.
🔹 Conclusion
The NKTg law provides a novel way to interpolate planetary masses with extremely high accuracy, while also being sensitive to subtle physical changes like Earth’s gradual mass loss.
This could open up new opportunities for:
- Data-driven planetary modeling in MATLAB.
- Improved sensitivity in detecting small-scale variations not included in standard NASA datasets.
References:
- NASA JPL Horizons (planetary positions & velocities)
- NASA Planetary Fact Sheet (official masses)
- GRACE / GRACE-FO Mission Data (Earth mass loss)
I’d be very interested in hearing thoughts from the community about:
- How to integrate the NKTg model into MATLAB orbital simulations.
- Whether conserved quantities like NKTg1 could provide practical value beyond astronomy (e.g., physics simulations, engineering).
You can refer to the following four related articles to gain a deeper understanding of the NKTg Law and its applications
Best regards,
Nguyen Khanh Tung
I’d like to take a moment to highlight the great contributions of one of our community members, @Paul, who is fast approaching an impressive 5,000 reputation points!
Paul has built his reputation the best way possible - by generously sharing his knowledge and helping others. Over the last few years, he’s provided thoughtful and practical answers to hundreds of questions, making life a little easier for learners and experts alike.
Reputation points are more than just numbers here - they represent the trust and appreciation of the community. Paul’s upcoming milestone is a testament to his consistency, expertise, and willingness to support others.
Please join me in recognizing Paul's contributions and impact on the MATLAB Central community.
Function Syntax Design Conundrum
As a MATLAB enthusiast, I particularly enjoy Steve Eddins' blog and the cool things he explores. MATLAB's new argument blocks are great, but there's one frustrating limitation that Steve outlined beautifully in his blog post "Function Syntax Design Conundrum": cases where an argument should accept both enumerated values AND other data types.
Steve points out this could be done using the input parser, but I prefer having tab completions and I'm not a fan of maintaining function signature JSON files for all my functions.
Personal Context on Enumerations
To be clear: I honestly don't like enumerations in any way, shape, or form. One reason is how awkward they are. I've long suspected they're simply predefined constructor calls with a set argument, and I think that's all but confirmed here. This explains why I've had to fight the enumeration system when trying to take arguments of many types and normalize them to enumerated members, or have numeric values displayed as enumerated members without being recast to the superclass every operation.
The Discovery
While playing around extensively with metadata for another project, I realized (and I'm entirely unsure why it took so long) that the properties of a metaclass object are just, in many cases, the attributes of the classdef. In this realization, I found a solution to Steve's and my problem.
To be clear: I'm not in love with this solution. I would much prefer a better approach for allowing variable sets of membership validation for arguments. But as it stands, we don't have that, so here's an interesting, if incredibly hacky, solution.
If you call struct() on a metaclass object to view its hidden properties, you'll notice that in addition to the public "Enumeration" property, there's a hidden "Enumerable" property. They're both logicals, which implies they're likely functionally distinct. I was curious about that distinction and hoped to find some functionality by intentionally manipulating these values - and I did, solving the exact problem Steve mentions.
The Problem Statement
We have a function with an argument that should allow "dual" input types: enumerated values (Steve's example uses days of the week, mine uses the "all" option available in various dimension-operating functions) AND integers. We want tab completion for the enumerated values while still accepting the numeric inputs.
A Solution for Tab-Completion Supported Arguments
Rather than spoil Steve's blog post, let me use my own example: implementing a none() function. The definition is simple enough tf = ~any(A, dim); but when we wrap this in another function, we lose the tab-completion that any() provides for the dim argument (which gives you "all"). There's no great way to implement this as a function author currently - at least, that's well documented.
So here's my solution:
%% Example Function Implementation
% This is a simple implementation of the DimensionArgument class for implementing dual type inputs that allow enumerated tab-completion.
function tf = none(A, dim)
arguments(Input)
A logical;
dim DimensionArgument = DimensionArgument(A, true);
end
% Simple example (notice the use of uplus to unwrap the hidden property)
tf = ~any(A, +dim);
end
I like this approach because the additional work required to implement it, once the enumeration class is initialized, is minimal. Here are examples of function calls, note that the behavior parallels that of the MATLAB native-style tab-completion:
%% Test Data
% Simple logical array for testing
A = randi([0, 1], [3, 5], "logical");
%% Example function calls
tf = none(A, "all"); % This is the tab-completion it's 1:1 with MATLABs behavior
tf = none(A, [1, 2]); % We can still use valid arguments (validated in the constructor)
tf = none(A); % Showcase of the constructors use as a default argument generator
How It Works
What makes this work is the previously mentioned Enumeration attribute. By setting Enumeration = false while still declaring an enumeration block in the classdef file, we get the suggested members as auto-complete suggestions. As I hinted at, the value of enumerations (if you don't subclass a builtin and define values with the someMember (1) syntax) are simply arguments to constructor calls.
We also get full control over the storage and handling of the class, which means we lose the implicit storage that enumerations normally provide and are responsible for doing so ourselves - but I much prefer this. We can implement internal validation logic to ensure values that aren't in the enumerated set still comply with our constraints, and store the input (whether the enumerated member or alternative type) in an internal property.
As seen in the example class below, this maintains a convenient interface for both the function caller and author the only particuarly verbose portion is the conversion methods... Which if your willing to double down on the uplus unwrapping context can be avoided. What I have personally done is overload the uplus function to return the input (or perform the identity property) this allowss for the uplus to be used universally to unwrap inputs and for those that cant, and dont have a uplus definition, the value itself is just returned:
classdef(Enumeration = false) DimensionArgument % < matlab.mixin.internal.MatrixDisplay
%DimensionArgument Enumeration class to provide auto-complete on functions needing the dimension type seen in all()
% Enumerations are just macros to make constructor calls with a known set of arguments. Declaring the 'all'
% enumeration member means this class can be set as the type for an input and the auto-completion for the given
% argument will show the enumeration members, allowing tab-completion. Declaring the Enumeration attribute of
% the class as false gives us control over the constructor and internal implementation. As such we can use it
% to validate the numeric inputs, in the event the 'all' option was not used, and return an object that will
% then work in place of valid dimension argument options.
%% Enumeration members
% These are the auto-complete options you'd like to make available for the function signature for a given
% argument.
enumeration(Description="Enumerated value for the dimension argument.")
all
end
%% Properties
% The internal property allows the constructor's input to be stored; this ensures that the value is store and
% that the output of the constructor has the class type so that the validation passes.
% (Constructors must return the an object of the class they're a constructor for)
properties(Hidden, Description="Storage of the constructor input for later use.")
Data = [];
end
%% Constructor method
% By the magic of declaring (Enumeration = false) in our class def arguments we get full control over the
% constructor implementation.
%
% The second argument in this specific instance is to enable the argument's default value to be set in the
% arguments block itself as opposed to doing so in the function body... I like this better but if you didn't
% you could just as easily keep the constructor simple.
methods
function obj = DimensionArgument(A, Adim)
%DimensionArgument Initialize the dimension argument.
arguments
% This will be the enumeration member name from auto-completed entries, or the raw user input if not
% used.
A = [];
% A flag that indicates to create the value using different logic, in this case the first non-singleton
% dimension, because this matches the behavior of functions like, all(), sum() prod(), etc.
Adim (1, 1) logical = false;
end
if(Adim)
% Allows default initialization from an input to match the aforemention function's behavior
obj.Data = firstNonscalarDim(A);
else
% As a convenience for this style of implementation we can validate the input to ensure that since we're
% suppose to be an enumeration, the input is valid
DimensionArgument.mustBeValidMember(A);
% Store the input in a hidden property since declaring ~Enumeration means we are responsible for storing
% it.
obj.Data = A;
end
end
end
%% Conversion methods
% Applies conversion to the data property so that implicit casting of functions works. Unfortunately most of
% the MathWorks defined functions use a different system than that employed by the arguments block, which
% defers to the class defined converter methods... Which is why uplus (+obj) has been defined to unwrap the
% data for ease of use.
methods
function obj = uplus(obj)
obj = obj.Data;
end
function str = char(obj)
str = char(obj.Data);
end
function str = cellstr(obj)
str = cellstr(obj.Data);
end
function str = string(obj)
str = string(obj.Data);
end
function A = double(obj)
A = double(obj.Data);
end
function A = int8(obj)
A = int8(obj.Data);
end
function A = int16(obj)
A = int16(obj.Data);
end
function A = int32(obj)
A = int32(obj.Data);
end
function A = int64(obj)
A = int64(obj.Data);
end
end
%% Validation methods
% These utility methods are for input validation
methods(Static, Access = private)
function tf = isValidMember(obj)
%isValidMember Checks that the input is a valid dimension argument.
tf = (istext(obj) && all(obj == "all", "all")) || (isnumeric(obj) && all(isint(obj) & obj > 0, "all"));
end
function mustBeValidMember(obj)
%mustBeValidMember Validates that the input is a valid dimension argument for the dim/dimVec arguments.
if(~DimensionArgument.isValidMember(obj))
exception("JB:DimensionArgument:InvalidInput", "Input must be an integer value or the term 'all'.")
end
end
end
%% Convenient data display passthrough
methods
function disp(obj, name)
arguments
obj DimensionArgument
name string {mustBeScalarOrEmpty} = [];
end
% Dispatch internal data's display implementation
display(obj.Data, char(name));
end
end
end
In the event you'd actually play with theres here are the function definitions for some of the utility functions I used in them, including my exception would be a pain so i wont, these cases wont use it any...
% Far from my definition isint() but is consistent with mustBeInteger() for real numbers but will suffice for the example
function tf = isint(A)
arguments
A {mustBeNumeric(A)};
end
tf = floor(A) == A
end
% Sort of the same but its fine
function dim = firstNonscalarDim(A)
arguments
A
end
dim = [find(size(A) > 1, 1), 0];
dim(1) = dim(1);
end
Hello MATLAB Central, this is my first article.
My name is Yann. And I love MATLAB.
I also love HTTP (i know, weird fetish)
So i started a conversation with ChatGPT about it:
gitclone('https://github.com/yanndebray/HTTP-with-MATLAB');
cd('HTTP-with-MATLAB')
http_with_MATLAB
I'm not sure that this platform is intended to clone repos from github, but i figured I'd paste this shortcut in case you want to try out my live script http_with_MATLAB.m
A lot of what i program lately relies on external web services (either for fetching data, or calling LLMs).
So I wrote a small tutorial of the 7 or so things I feel like I need to remember when making HTTP requests in MATLAB.
Let me know what you think
a = [ 1 2 3 ]
a =
1 2 3
b = [ 3; 5; 8]
b =
3
5
8
x = a + b
x =
4 5 6
6 7 8
9 10 11
Hi,
I have some problem, I want to upload my data that sample rate at 500HZ, every sevral seconds.
My data include 12 bytes, and it measure 500HZ, for example for 15 seconds I coolect 15*500*12 = 84KB.
Can I upload this data to ThingSpeak? It is possible to use with Free acount (I am student and this is my project)
How can help me..
I can not understand why Plot Browser was taken away in latest Matlab... I use Plot Browser all of the time! Having to find and click the particular line I want in a plot with a lot of lines is way less convenient than just selecting it in the Plot Browser. Also, being able to quickly hide/show multiple lines at once with the plot browser was so helpful in a lot of cases. Please bring Plot Browser back!!!! Please reply with support for this if you feel the same as I do!